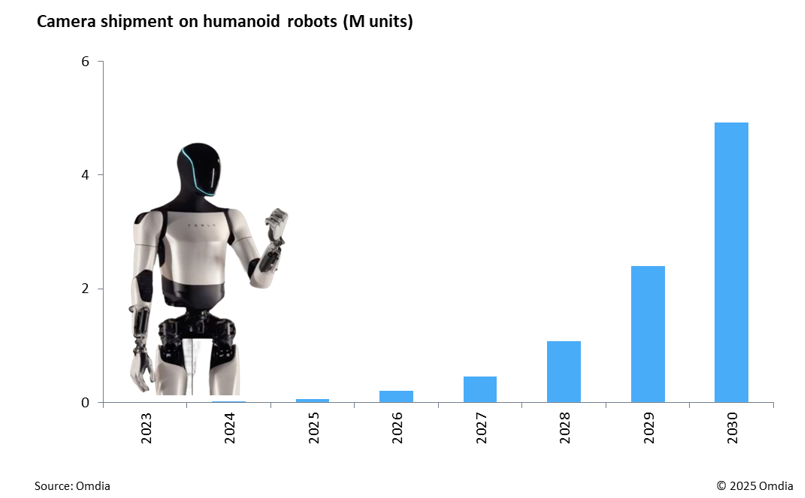
智通財經APP獲悉,根據Omdia測算,2024-2030年全球人形機器人出貨量的年複合增長率將達到84%,從而帶動上游視覺傳感器需求快速放量。作為人形機器人感知系統的核心組成部分,視覺傳感器承擔着環境建模、目標識別與交互反饋等關鍵任務。
以特斯拉(TSLA.US)為例,初代Optimus裝配了8顆攝像頭,覆蓋頭部、肩部、腰部三個高度。二代的Optimus Gen-2則保留了三個攝像頭在頭部,依託自研Dojo D1芯片進行圖像識別訓練。國內廠商優必選(09880)的WALKER X人形機器人採用胸部四目系統及頭部加腰部雙RGBD傳感器,以實現出色的物體和場景識別。視覺傳感器作為核心感知模塊在人形機器人的設計中佔據重要的地位。
人形機器人攝像頭出貨量預測
與自動駕駛類似,單一的傳感器難以滿足人形機器人識別複雜場景需求,多傳感器融合方案成為技術演進的核心方向。除特斯拉採用純視覺方案外,多數廠商選用多傳感器融合的方案,這些傳感器包括攝像頭、激光雷達、毫米波雷達、紅外傳感器等。
自動駕駛與人形機器人視覺傳感器對比

3D視覺技術在機器人視覺感知中佔據主導地位。雙目視覺、結構光和飛行時間(ToF)是當前主流的方案。雙目視覺通過模擬人眼視差實現深度感知,結構光通過投射編碼光斑進行三維重建,而ToF則通過計算光線反射時間獲取距離信息。相比於傳統的2D視覺,3D視覺提供了更加豐富和可靠的空間信息,幫助機器人在複雜的場景中自如行動。
人形機器人的視覺系統還將進一步與其他傳感器(如觸覺、聽覺)結合,實現多模態感知。這樣的多元感知可以更全面地理解環境,提高機器人在複雜情境中的表現。為使傳感器模塊更加集成化與小型化,傳感器和處理單元將朝着一體化方向發展。這將使人形機器人具備更高的靈活性與機動性,同時減少了多個傳感器之間的通信成本。
人形機器人視覺傳感器正經歷從「被動感知」向「智能融合」的轉型。隨着3D視覺技術的成熟、以及AI算法的賦能,視覺系統將升級為主動決策的核心單元。然而,行業仍需在低成本化、標準化和跨平台兼容性上尋求突破。未來五年內,視覺傳感器將推動人形機器人在工業自動化、家庭服務和特種作業等場景中實現規模化落地,開啓人機協作的新紀元。