你知道,在蔚來現有用戶中,智能泊車輔助功能的使用率達到了多少嗎?
答案是60%。
沒錯,隨着今年3月蔚來推送「隨心停」功能,加上此前的各類車位泊入、離車泊入、全向遙控泊出、直線召喚等功能,蔚來實現了行業功能矩陣最完善、場景覆蓋最全的智能泊車輔助。此後的一個月裏,有60%的蔚來用戶在使用智能泊車輔助,平均每秒就有超過2名蔚來用戶「優雅泊入」。
這意味着,智能泊車已經成為了蔚來整個智能駕駛輔助體系中,用戶最高頻使用的功能。

既然用戶已經這麼愛用,那接下來蔚來的智能泊車還有什麼進步的空間呢?
當然有。一方面,我們要持續提升泊車的體驗,在覆蓋場景和泊入效率上繼續增強;另一方面,智能泊車最終的目的不是把車停到車位,而是為了更便捷地下車,進入到下一場景中。

因此,在「蔚來世界模型 NWM」的首個版本中,我們用行業首個全模型化的智能泊車輔助,把泊車的上限再次提升。
那麼,全模型化的智能泊車輔助,究竟提升了什麼?我們不妨先來看一個短片。
「NWM智能泊車」
解決了什麼痛點?
如果你回想一下自己使用智能泊車輔助的過程,大概會有這麼幾個步驟:第一步人看到空車位,第二步手動把車開到空車位前,第三步在中控屏上選擇要泊入的車位,第四步等待車輛泊入。
那麼,這裏其實就有幾個亟待優化的痛點。
首先,能識別的車位範圍很窄。
大多數智能泊車都是依靠4顆環視攝像頭來識別車位,可以識別的範圍通常也就是周邊兩三個車位。所以,找尋車位必須要靠人眼,找到後也必須要把車開到空車位的前方停正,才能啓動智能泊車。
其次,發起智能泊車的位置很受限。
比如,當車輛已經處在車位裏時,大多數智能泊車是無法啓動的。這時如果需要騰挪車位,就必須要手動將車開出,把車開到目標車位前,才能進行智能泊車。
然後,泊入過程非常機械化。
依賴規則的智能泊車輔助,在泊車軌跡的計算上也會比較教條。比如側方位的泊車,即便目標車位前後沒有車,也一定要完整地復現一遍科目二的標準動作;比如原有泊車軌跡上如果突然多出了障礙物,大概也就會卡死在原地。
而這些痛點,蔚來通過行業首個全模型化的智能泊車輔助功能,可以一一解決。

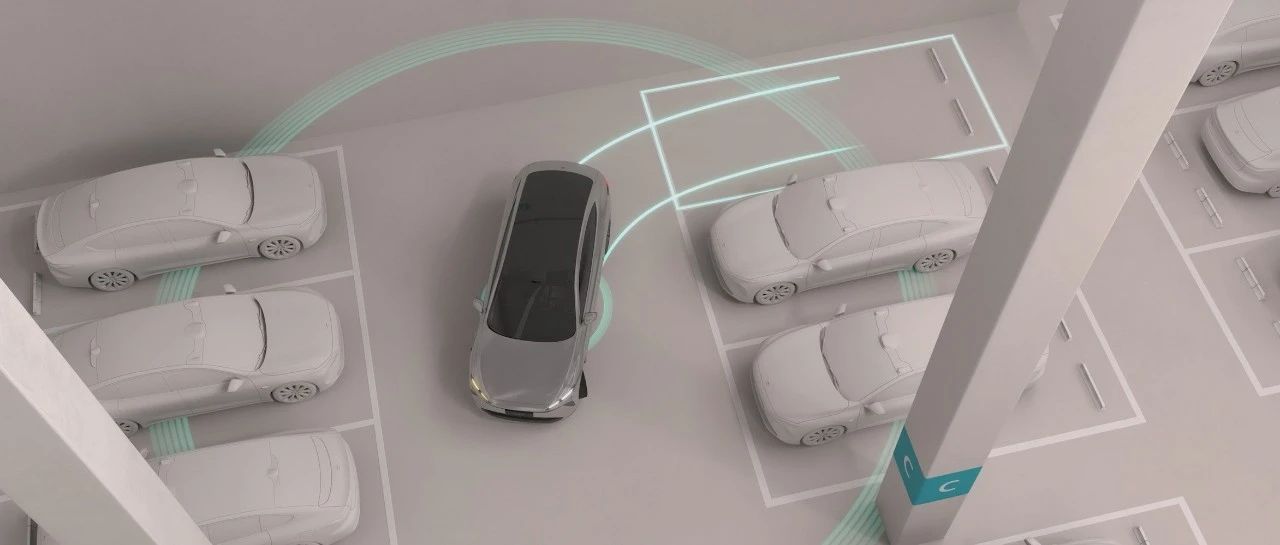
在「蔚來世界模型 NWM」中,泊車不再只調用4個環視攝像頭,而是將負責行車的7個800萬像素攝像頭加入進來。這不僅大幅拓展了車位識別的範圍,而且在模型能力的支持下,還可以像鳥瞰一樣,俯視觀察和理解停車場的車位與空間結構信息。
正如大家在視頻中所看到,NWM智能泊車可以實現360°全向車位識別,不管是側邊的、對面的、背後的、隔着立柱的、跨通道的車位,NWM智能泊車都可以識別,顯示範圍相比傳統的智能泊車提升了4倍。而且因為蔚來獨有的瞭望塔式傳感器佈局,可以在複雜的場景裏越過遮擋,看到人眼所看不到的,做到「超視距」的車位識別。

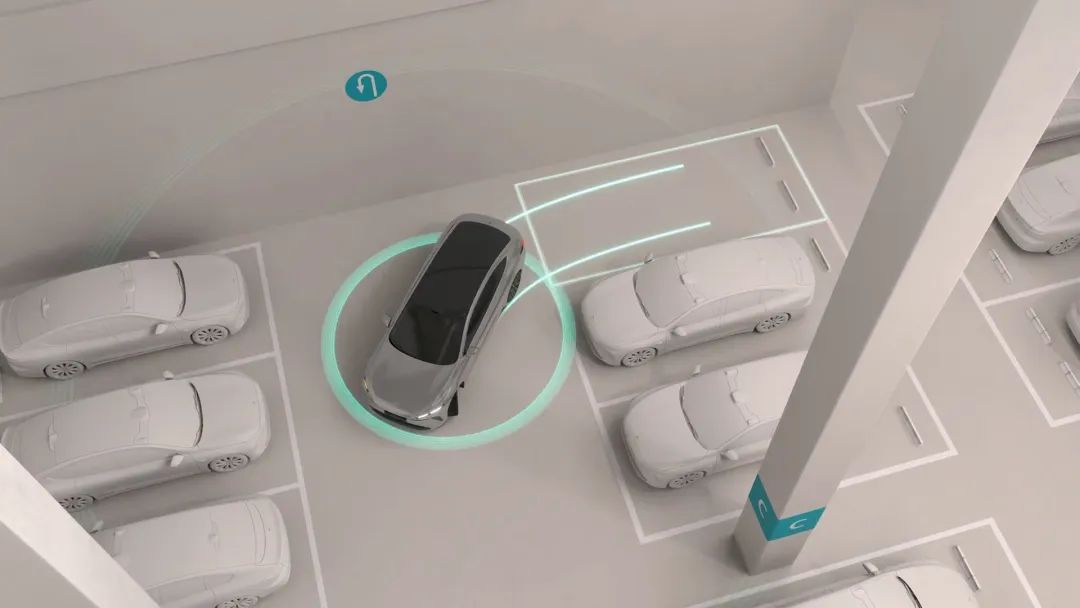
而且,NWM智能泊車不僅「可見即可選」,還能做到「可選即可泊」。不需要特定的起點,只要發現了目標車位,那麼在任意位置都能發起泊車指令。即便是跨通道的車位,NWM智能泊車也能借用通道進行長距離的漫遊泊車,或者在車位中騰挪自動換車位。
最後,NWM智能泊車基於大量優秀司機數據的模型訓練,不僅泊車軌跡的規劃更擬人,而且軌跡可以做到實時規劃。借用空車位空間提升整體泊車效率,對於NWM智能泊車自然不在話下,哪怕是泊車過程中,有人突然往後面放了個樁桶,NWM智能泊車也能即時計算,立刻規劃出一條全新的路線,比泊車高手還高手。

所以,我們可以用三點總結一下全模型化的NWM智能泊車:360°超視距車位識別指哪打哪、軌跡實時規劃更擬人、能借用通道長距離漫遊泊車。
行業最好用智能泊車
如何再升級?
在NWM智能泊車到來之前,蔚來用戶的智能泊車使用率之所以能達到60%,功能場景覆蓋全面當然是很重要的一點。
車位的識別上,蔚來智能泊車對水平、垂直、斜列、弧度、低矮坡度等多種類型車位均能響應。遙控泊車的形式上,蔚來智能泊車既能直線召喚,也能全向遙控泊出,配合NIO Phone還能實現下車無需任何操作的超感泊車。操作的方式上,蔚來智能泊車既能車機螢幕操作、NOMI語音喚醒操作,還支持行業內唯一的物理按鍵一鍵泊車。

但更讓蔚來用戶愛用智能泊車的,還遠不只是覆蓋場景豐富,更有優秀的體驗。蔚來智能泊車的平均泊車入位時間僅為35秒,近40%的車位可以實現一把入位、無需騰挪。而且,蔚來智能泊車在速度3km/h下都可以激活,不需要把車剎停,泊入過程中還可以自動偏向非主駕側,不需要任何操作就可以為主駕位留出更多的下車空間。
總結下來,蔚來智能泊車在此前已經給用戶提供了足夠的可用性、成功率與安心感,從而獲得了用戶的高頻使用。

但是,這些都還算是智能泊車的「下限」。而NWM智能泊車的目的,就是在守住基礎體驗下限的同時,做好突出能力提升的上限場景,不僅讓智能泊車的擬人化媲美老司機,同時為將來更先進的智能泊車形態,進行能力的準備。比如大家看到NWM智能泊車現在可以跨通道漫遊、跨車位騰挪,而這在將來就是遠程遙控或者召喚的基礎,也是為用戶提供安心、自由的下車體驗的重要能力儲備。
在「蔚來世界模型 NWM」首個版本推送後,我們希望能有更多的用戶朋友們使用蔚來的智能泊車。或許在下次統計數據時,泊車能力「下降」的蔚來用戶,可能就不只有60%了。

「蔚來世界模型 NWM」首個版本,將於5月底全量推送「Banyan 榕」車型,將於6月底全量推送「Cedar 雪松」車型,敬請期待。





文章原文
