炒股就看金麒麟分析師研報,權威,專業,及時,全面,助您挖掘潛力主題機會!
具身智能領域,是不是夠火爆了?
但市面上常見的,大多是四足機器狗、人形機器人,機械臂……都在地上作業。
現在,一種會飛的具身智能機器人,也進入了創業商用賽道:
巴掌大小,重量約200克,搭載計算芯片和視覺方案,可負載起飛。
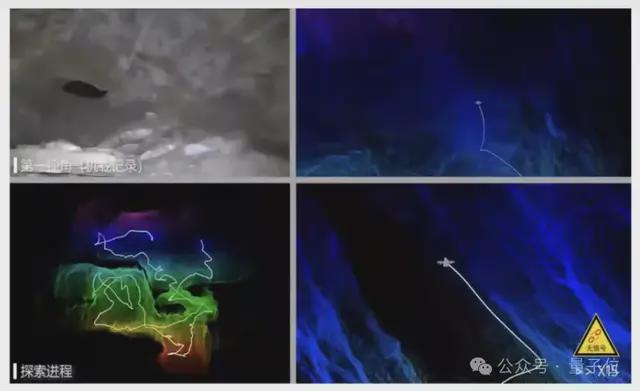
在沒有GPS、沒有信號覆蓋的狹窄通道中,可以獨立完成自主建圖,全程無需人為干預。
且執行任務過程中的所有決策及其行為,都來自於自己的大腦,並不依靠固定流程或地面遙控。
更重要的是,N個飛行機器人還能組團幹活,進行擬人化的智能協同。
所有的操作都無需人為介入。

以上,就是具身智能創業公司微分智飛正在專注做的事情。
微分智飛由浙江大學控制科學與工程學院長聘副教授、博士生導師高飛於去年底創辦。兩年前,他帶隊研發的飛行機器人蜂羣就登上了《Science Robotics》封面。
帶着十幾年的研究積澱,高飛想把飛行機器人推向市場。今年4月,公司連續完成了兩輪孖展。
所以,具身智能飛行機器人和無人機,究竟有什麼區別?
高飛教授向我們分享了他的思考和實踐。
相信很多人都有這個疑問:飛行機器人和無人機,到底有什麼區別?
高飛解釋道,傳統無人機本質上是被遙控的飛行器(Aircraft),依賴人的操作,比如遙控器或者地面站指令。
即使是燈光秀或預設路徑配送外賣式的自動航線飛行,也是預先編程或依賴GPS等外部定位,缺乏實時自主決策。
與之相比,飛行機器人是具有自主決策能力的智能體(Agent),高度自主,能在斷網的無信號環境下獨立完成任務。
其靈魂是能「獨立感知環境-理解任務-做出決策-閉環執行任務」,完全脫離人的實時控制。
如此說來,飛行機器人才是真正的「無人」機。

而且這套能力的核心,正是具身智能的理念:機器人必須通過與環境的互動來習得技能,才能真正具備適應性。
但高飛在這個領域的深耕比「具身智能」概念火起來要早得多。
當初在香港科技大學讀博期間,他就專注於解決單機自主飛行的核心挑戰,即實現無人機從起點到終點的全程無人干預自主飛行。
高飛的博導給他佈置了一個任務:
那時候還沒有大模型,更別提落實具身智能。
為了實現真正的自主飛行,高飛依賴的是一整套高度耦合的工程體系:多傳感器融合、精確建模、低功耗嵌入式算法……所有計算都得跑在資源極有限的硬件上,必須極致優化,才能撐起整個系統閉環。
據高飛講述,那時候走的是一條更工程理性的路徑,需要依賴精確的數學模型、傳感器融合、系統控制理論,從而構建穩定可靠的功能性閉環。
但不變的是一種觀點——飛行機器人必須靠自身感知獲取環境信息、必須實時閉環決策(而不是靠遠程規劃)、必須在不確定性中適應性執行。
這些思想,與後來具身智能範式的底層邏輯不謀而合。

後來,具身智能興起,它強調通過身體交互獲得智能。高飛覺得這也是讓飛行機器人實現智能的一種途徑,於是也因此開始側重數據驅動的學習。
後期的飛行機器人集羣研究中,高飛開始引入強化學習訓練協同策略,在仿真環境中訓練無人機完成任務策略。但相關的底層定位、控制等仍以傳統方法為主。
總而言之,現在仍然拋不開傳統方法——
很多人會以為,要實現這樣的智能必須依賴大模型。但高飛的看法是,大模型更多是在上層幫助理解複雜任務,比如「幫我找一束花」「判斷哪塊區域有危險」。
而讓機器人能真的飛起來、飛得準、飛得穩的,依然靠的是底層的感知、算法和控制力。
這纔是飛行機器人的基礎工程能力。
一般而言,飛行機器人具有以下幾個關鍵部件:
以此為硬件基礎,高飛創業的微分智飛,有以下三大技術特色:
第一,極強的自主決策能力。這一點通過算法來實現。
無GPS、無信標、無遙控,全靠傳感器融合定位、動態避障算法與運動規劃,高飛團隊在非結構化場景(如礦山、林下、隧道)完成首創全自主飛行。
高飛介紹,下發任務指令後,全程無需實時信號(可斷連),飛行機器人能自行維護環境地圖、計算最短返航路徑,並能在電量臨界點前自動返航。
在此過程中,飛行機器人需要智能決策最優路徑,譬如探索完一個房間再出去,避免反覆進出。
飛行機器人返航後,可提取全部採樣數據。
第二,高效協同的集羣技術。
早期在港科大解決單體自主導航的高飛,進入浙大後開始研究集羣協同。
他的目標是實現類似人類集羣——如軍訓走方陣——的分佈式智能協同,而非無人機燈光秀式的集中控制。
這其中的主要難點,是集羣中的每一個飛行機器人既需要個體需足夠自主智能,協同時又要高效溝通、分工,不能起衝突。

高飛團隊給出的解決辦法是「集中式學習,分佈式運行」。
在高保真仿真環境中,數萬乃至數十萬智能體圍繞同一全局目標進行集中式學習,以更高效地習得協同決策策略;與此同時,通過隨機擾動環境參數、感知噪聲和場景紋理,使模型的適應性不斷增強。
在訓練過程中,團隊預先設計了可變規模機制以適應實際操作中集羣規模的動態變化,並將強化學習與傳統控制相結合,最大限度縮小仿真與現實之間的遷移差距,從而顯著提升算法在複雜場景中的泛化能力與可靠性。
第三,小型化與硬件集成頗有積澱。
微分智飛的特色就是專注做小型飛行機器人,最小的那一款只有巴掌大小。
因為小,在很多人類不能進入的環境下,能夠靈活地飛行並完成任務。
也是因為小,飛行機器人傳感器變弱、計算資源受限、續航變短,各方面載荷受限,對算法效率、模型輕量化、軟硬件集成度要求極高,有很高的技術門檻。這就離不開高飛在這個領域10餘年的積累。
如果在這種條件下還能實現自主智能,那就是真正的把難題解決到極致。高飛表示:
目前,微分智飛共有兩條產品線,三款在研機型。
一條行業線,也是公司的產品線主力,主要用於自主探測建圖與巡檢。
主要落地場景瞄準應急、礦山、林場、綜合管廊、倉儲等場景,講究成本和可靠性,工業級要求高精度(釐米級甚至毫米級定位建圖)和高穩定性。
計劃2025年年內推出2款產品,軸距25-35公分左右,續航>40分鐘。
一條教育線,提供開放、標準可開發平台,可二次開發。
主要目的是創建教育科研生態,降低學生手搓門檻。
迄今為止,高校學生或科研人員還沒有這樣的生態環境可用,如有需要,只能手搓——而且是非標準化、高成本、強依賴個人技能的那種。
飛控主板、傳感器、動力系統、結構件……沒有統一供應鏈,學生需自行從不同渠道採購零件。
不僅來源零散,小批量加工成本還高,採購的零件要麼無冗餘要麼過剩。用高飛的話來說,「100個起售,但買100個最後只用得上2個」。

除此外,軟件層面基本都基於開源飛控二次開發,但開源代碼碎片化,調試耗時。
綜上所述,其實教育線產品的目標很明確:
要把高校「人人手搓飛行機器人」的局面變成「標準平台+自主開發」的常態。
其實,高飛做這件事也算是一種還願——
他從小就是個航空愛好者,最大的夢想是開戰鬥機。後來沒能飛上天,就轉而研究飛行機器人,把自己對飛行的執念灌注進小小的機器中。
高飛回憶自己當年在實驗室裏手搓機器的日子:一個部件畫圖加工就要等一周,炸機一次成本幾千,還時常因為缺資料耽誤實驗。現在,他希望給後來的科研學生提供更好的起點。

但對高飛來說,僅僅搞科研、發論文是不夠的。
他清楚地知道實驗室成果如果不能走向市場,那就是差了一環。因此,他選擇創業。
不只是為了把技術落地,更是為了把飛行機器人這條技術鏈真正閉合走向落地。
現階段,微分智飛的主要策略是專注產品,不把自己變成服務型公司。
儘管To B場景裏很多客戶更願意為服務買單,但高飛堅持產品優先、技術閉環的路徑。
雖有十多年的科研積累,但形容這段創業經歷時,高飛用了個詞叫「進化」。
他說,科研人做公司,得找到互補的合夥人,同時從頭學產品、學市場、學成本控制,從算法理論到芯片選型,從論文邏輯到供應鏈周期,每一步都得親手趟過去。