炒股就看金麒麟分析師研報,權威,專業,及時,全面,助您挖掘潛力主題機會!

作者:張昊,伊利諾伊大學香檳分校博士生,研究方向為 3D/4D 重建、生成建模與物理驅動動畫。目前在 Snap 擔任研究實習生,曾於 Stability AI 和上海人工智能實驗室實習。PhysRig 由 UIUC 與 Stability AI 聯合完成,旨在推動角色動畫邁向更真實、可控的物理解法。
個人主頁:https://haoz19.github.io/

動畫角色在動起來時,是否常常顯得 「塑料感十足」?即使使用再複雜的骨骼系統,人物走路時還是像帶着鉸鏈的木偶?這是因為當前主流的綁定(rigging)技術 —— 線性混合蒙皮(Linear Blend Skinning,簡稱 LBS)雖然效率高、計算方便,但在遇到柔軟材質(如皮膚、脂肪、動物尾巴)時,往往會出現體積丟失、扭曲甚至 「糖果包裹」 效應,嚴重影響真實感。
在 ICCV 2025 最新接收論文《PhysRig: Differentiable Physics-Based Skinning and Rigging Framework》中,來自 UIUC 和 Stability AI 的研究者提出了一個新框架:將 「剛性骨架 + 彈性軟體」 的建模方式引入綁定流程,利用可微分物理模擬方法,實現更真實、更自然的動畫角色變形效果。

01 | 傳統 LBS 的困境
LBS 通過將每個點的位置作為骨骼變換的加權平均來生成動畫。這種方法在過去幾十年中被廣泛使用於遊戲、影視、甚至研究中。但它的本質是線性的、非物理的。
其主要問題包括:
儘管也有研究嘗試使用深度學習優化 LBS 的權重或參數,但其結構性的缺陷始終難以彌補。
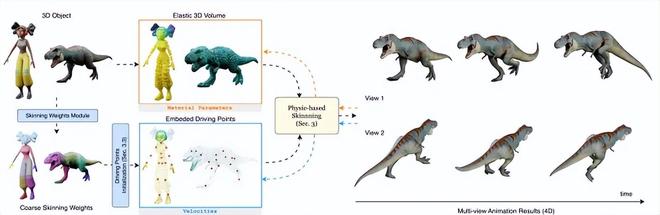
02 | PhysRig 的核心思想
PhysRig 開闢了一條新路:把骨骼嵌入到一個可變形的柔體體積中,讓骨骼帶動的不再是直接控制的點,而是通過模擬物理過程,產生形變結果。
整個框架有三個關鍵組件:
可微物理模擬器
材料原型(Material Prototypes)
驅動點系統(Driving Points)
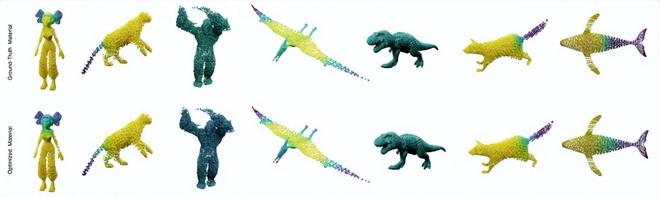
03 | 物理模擬與優化策略
為了實現從 「觀察到的動畫結果」 反推出 「內部骨骼運動和材質參數」
,PhysRig 提出了迭代式的反向綁定(Inverse Skinning)優化流程:
1. 固定骨骼速度,優化材料參數;
2. 固定材料參數,逐幀優化驅動點速度;
3. 兩者交替迭代,直到收斂。
這種策略考慮了材料屬性的 「時序一致性」與骨骼動作的 「逐幀局部性」,使得優化更穩定、高效。
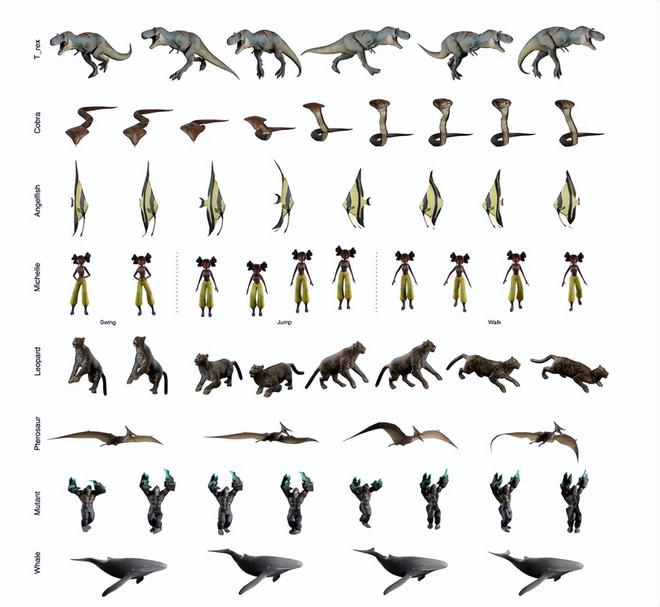
04 | 全面評測與數據集
為了全面驗證 PhysRig 的有效性,研究者構建了一個包含17 種角色(共 120 組動畫序列)的數據集,涵蓋:
對比對象包括:
採用指標包括用戶評分(User Rating)和 Chamfer 距離(CD),PhysRig 在幾乎所有類別上都顯著優於傳統方法,表現出更真實的動態效果。
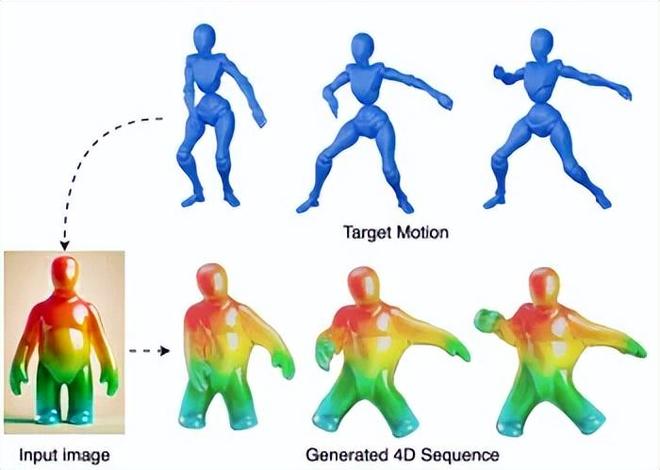
05 | 拓展應用:動作遷移
PhysRig 不僅能從已有動畫反推參數,還可以實現基於骨架角度的動作遷移(Pose Transfer)。
具體做法是:
1. 提取源動畫的骨骼角度序列;
2. 將其傳遞給目標對象(如不同物種);
3. 使用 PhysRig 生成自然形變的體積動畫。
相比傳統需要預測蒙皮權重的方法,PhysRig 不依賴顯式權重預測,更適合處理結構差異大的對象(比如人到果凍怪的動作遷移)。

06 | 總結與展望
PhysRig 提供了一種從傳統 rigging 邁向物理真實綁定的路徑:
目前,項目已在官網上線展示,並計劃在 ICCV 2025 會議前後開源代碼與數據集。未來還計劃將其封裝為 Blender 插件,面向動畫藝術家提供可用工具。
如果你也對物理模擬和角色動畫感興趣,歡迎訪問項目主頁或與作者聯繫交流!
(轉自:網易科技)