炒股就看金麒麟分析師研報,權威,專業,及時,全面,助您挖掘潛力主題機會!
10月30—31日,由上海機器人產業技術研究院、科尋科匯(上海)科技服務有限公司、電機新材料平台、機器人新材料平台、上海材薈信息科技有限公司聯合主辦,上海電機學院、東莞市磁性材料行業協會、廣東省磁性元器件行業協會共同支持的「人形機器人創新材料及高效驅動系統產業峯會」在上海聖諾亞皇冠假日酒店圓滿舉辦。
兩天會議聚焦「創新材料」與「驅動系統」兩大核心主題,匯聚了來自科研院所、材料企業、電機與機器人製造商的多位權威嘉賓,共同探討人形機器人產業鏈的關鍵技術演進與未來趨勢。
創新材料專場
以材料創新,賦能具身智能時代
 峯會主持人 深圳愛博合創醫療機器人有限公司 聯合創始人 任文永
峯會主持人 深圳愛博合創醫療機器人有限公司 聯合創始人 任文永10月30日的「創新材料專場」以主辦方上海國際技術交易市場總經理陳超的致辭拉開序幕。陳超指出材料科學與智能製造的融合,正成為推動人形機器人技術突破與產業化落地的重要驅動力。
 上海國際技術交易市場 總經理 陳超
上海國際技術交易市場 總經理 陳超首位嘉賓——國家地方共建人形機器人創新中心首席運營官朱星帶來主題演講《數據閉環驅動的具身智能系統演進》。他從系統層面剖析了具身智能的學習與控制邏輯,強調「數據-算法-執行」的閉環將成為下一階段機器人智能躍升的關鍵路徑。
 人形機器人(上海)有限公司 COO 朱星
人形機器人(上海)有限公司 COO 朱星寶武鎂業科技股份有限公司主任研究員王卓以《鎂合金賦能機器人產品輕量化》為題,分享了鎂合金在結構件中的應用成果。他指出,鎂合金優異的比強度與加工性能,為關節執行機構和骨架結構減重提供了高性價比解決方案。
 寶武鎂業科技股份有限公司 主任研究員 王卓
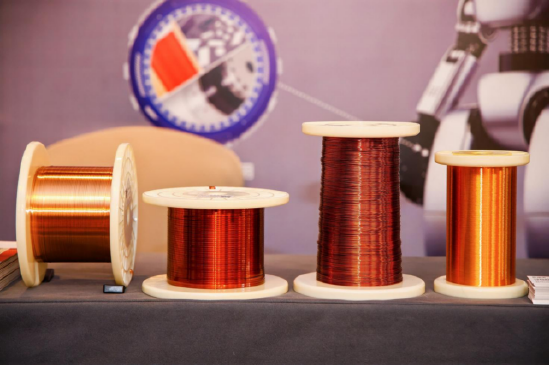
寶武鎂業科技股份有限公司 主任研究員 王卓來自寧波金田新材料有限公司工藝品管科長李明的演講《「線」引未來:電磁線——人形機器人的「神經與肌肉」》,聚焦電磁線在電機繞組中的性能革新。他強調,扁線與超細導線技術的突破將顯著提升人形機器人關節的能效與動態響應。
 寧波金田新材料有限公司工藝品管科長李明
寧波金田新材料有限公司工藝品管科長李明開普勒機器人副總經理張梅魁以《人形機器人在工業場景中的應用》為主題,展示了工業人形機器人的落地路徑。他表示,工業人形機器人將成為智能工廠柔性作業的關鍵節點,實現人機協作與場景自適應。
 開普勒機器人 中國業務負責人 張梅魁
開普勒機器人 中國業務負責人 張梅魁科思創工程塑料事業部機器人業務市場經理馮敏巍分享《智續未來——人形機器人發展浪潮下的材料效應》,提出在高強度、薄壁阻燃與可持續塑料方向,材料創新正成為提升機器人輕量化、安全性、感知與壽命的核心。
 科思創工程塑料事業部機器人業務市場經理 馮敏巍
科思創工程塑料事業部機器人業務市場經理 馮敏巍復旦大學智能機器人研究院副院長張文強帶來《具身智能:學習與發育》的學術報告,從認知與自適應機制角度探討了具身智能系統的「成長性」特徵,強調了仿生神經網絡在機器人學習中的重要性。
 復旦大學 智能機器人研究院副院長 張文強
復旦大學 智能機器人研究院副院長 張文強下午場由上海機器人產業技術研究院副院長田勁松開場,他在《人形機器人檢測認證技術發展趨勢》中指出,隨着機器人逐步進入人機共融環境,標準體系與認證機制將成為保障安全與可靠性的基石。
 上海機器人產業技術研究院 副院長 田勁松
上海機器人產業技術研究院 副院長 田勁松中研股份市場應用開發主管王軼舟以《PEEK在人形機器人中的應用與挑戰》為題,介紹了PEEK材料在傳動與支撐部件的高溫、高應力場景中的優勢與加工難點。
 中研股份 市場應用開發主管 王軼舟
中研股份 市場應用開發主管 王軼舟瓦克集團業務拓展經理胡暢的報告《瓦克高性能有機硅在機器人領域的綜合解決方案》,展示了有機硅材料在柔性關節封裝、耐疲勞絕緣及防護塗層中的多場景應用成果。
 瓦克集團 業務拓展經理 胡暢
瓦克集團 業務拓展經理 胡暢柔克智能機器人總經理助理王萌萌則以《具身智能驅動的新一代電力巡檢系統》為題,介紹了柔克智能在人形機器人巡檢系統中的算法與材料協同創新。
 柔克智能機器人 總經理助理 王萌萌
柔克智能機器人 總經理助理 王萌萌茶歇後,漢威科技集團具身智能傳感器研究院副院長何傳濤帶來《具身智能傳感器及應用》,強調多模態傳感融合將賦予機器人「環境感知與情感反饋」的能力。
 漢威科技集團 具身智能傳感器研究院 副院長 何傳濤
漢威科技集團 具身智能傳感器研究院 副院長 何傳濤當日最後一位嘉賓,浙江省康復機器人產學研負責人何瀾以《特殊人羣需求驅動下的人形機器人應用與創新》為題,分享了康復機器人在人機交互與社會陪護方向的實踐案例。
 浙江省康復機器人產學研負責人 何瀾
浙江省康復機器人產學研負責人 何瀾驅動系統專場
高效驅動,重塑人形之「力」
10月31日「驅動系統專場」由上海電機學院新型電機研發實驗室主任李全峯率先登台,發表《人形機器人關節電機國內外發展及未來關鍵技術探討》。他系統梳理了關節電機的小型化、高功率密度與高可靠性演進趨勢,指出「扁平化、模塊化、智能化」將成為未來方向。
 上海電機學院 新型電機研發實驗室主任 李全峯
上海電機學院 新型電機研發實驗室主任 李全峯意優科技驅控負責人李虎修帶來《機器人關節模組——從規模化量產到技術突破》,分享了關節模組在批量生產與精度控制間的平衡經驗。
 意優科技 驅控負責人 李虎修
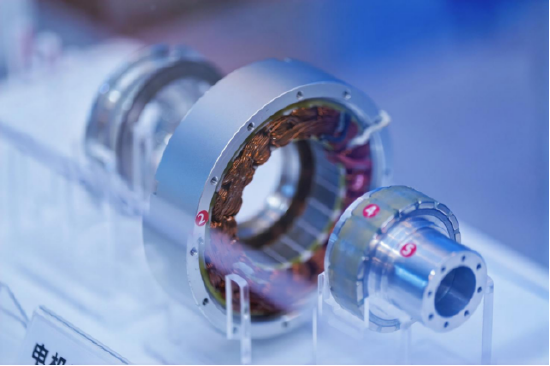
意優科技 驅控負責人 李虎修上海盤轂動力科技股份有限公司產品經理曲藝晗以《軸向磁通電機在機器人關節領域的應用》為題,展示了軸向磁通電機在高扭矩密度與空間利用率方面的突出優勢。
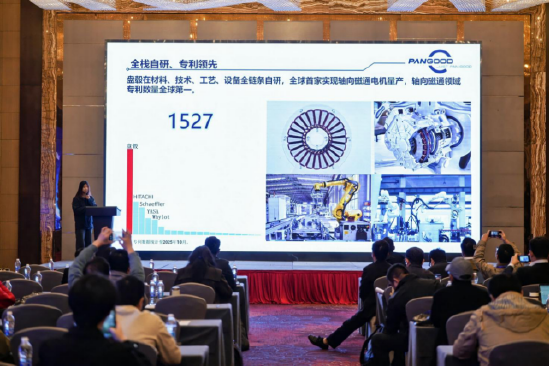 上海盤轂動力科技股份有限公司 產品經理 曲藝晗
上海盤轂動力科技股份有限公司 產品經理 曲藝晗在材料領域,獅子洋超材料(廣州)有限公司研發負責人曾俊報告《「超級銅」金屬基石墨烯複合材料性能及應用》,介紹了複合導電材料在散熱與高頻驅動環境下的優異表現。
 獅子洋超材料(廣州)有限公司 研發負責人 曾俊
獅子洋超材料(廣州)有限公司 研發負責人 曾俊金坤新材股份董事長陳亮帶來《稀土永磁在人形機器人中的設計思路與應用技巧》,深入分析了磁體在小型高效電機中的充磁方式與磁路優化策略。
 金坤新材股份 董事長 陳亮
金坤新材股份 董事長 陳亮上海智可派機器人科技有限公司副總裁潘峯發表《打造領先的多模態交互陪伴機器人》,分享了智可派在具身智能交互系統和情感計算算法方面的最新成果。
 上海智可派機器人科技有限公司 副總裁 潘峯
上海智可派機器人科技有限公司 副總裁 潘峯下午場由天創機器人生態合作總監湯稀雅開場,帶來《高危環境下的「鋼鐵巨人」:開啓工業危險作業新篇章》,展示了天創機器人在極端環境下作業的工程級應用。
 天創機器人 生態合作總監 湯稀雅
天創機器人 生態合作總監 湯稀雅寧夏君磁新材料科技有限公司董事長王心安以《超強粘結磁:高性能釤鐵氮永磁材料及其應用進展》為題,介紹了釤鐵氮材料在高溫穩定性與磁能積方面的最新突破。
 寧夏君磁新材料科技有限公司 董事長 王心安
寧夏君磁新材料科技有限公司 董事長 王心安天通股份總經理助理邢冰冰帶來《新型磁性材料助力人形機器人續航》,指出高性能磁材對能效與續航性能提升的重要意義。
 天通股份 總經理助理 邢冰冰
天通股份 總經理助理 邢冰冰隨後,浙江靈巧智能科技有限公司業務拓展總監範祥如以《靈巧智能賦予機器人「人類」的手》為題,介紹了Dexhand系列靈巧手的結構創新與控制策略。
 浙江靈巧智能科技有限公司 業務拓展總監 範祥如
浙江靈巧智能科技有限公司 業務拓展總監 範祥如高測股份研發總監邢旭的報告《人形機器人繩驅方案關鍵材料——新型低蠕變高耐磨金屬複合腱繩》,分享了柔性傳動系統在輕量化與可靠性平衡方面的最新研究。
 高測股份 研發總監 邢旭
高測股份 研發總監 邢旭大會最後由杭州巒啓機器人科技有限公司總經理劉奕作《未來靈巧手解決方案》演講,為峯會畫上圓滿句號。他強調,靈巧手將成為人形機器人「具身智能」的核心表達載體。
 杭州巒啓機器人科技有限公司 總經理 劉奕
杭州巒啓機器人科技有限公司 總經理 劉奕展商風采
跨界融合,推動產業
本次大會同期舉辦了人形機器人創新材料與高效驅動系統產品展示活動,吸引了來自3M中國有限公司、博邁立鋮投資(中國)有限公司、青島偉奧通自動化系統有限公司、寧波金田銅業(集團)股份有限公司、科思創(上海)投資有限公司、東莞金坤新材料股份有限公司、上海盤轂動力科技股份有限公司、卡瑪瑞貿易(浙江)有限公司、納獅新材料股份有限公司、上海機器人產業研究院、矩陣超智、宇疊智能、科尋科匯(上海)科技服務有限公司等十三家企業聯合參展。

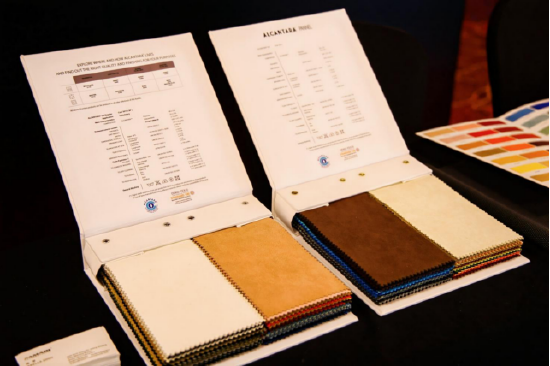
 卡瑪瑞(國際)有限公司 機器人親膚材料
卡瑪瑞(國際)有限公司 機器人親膚材料
 3M中國有限公司 機器人綜合膠粘解決方案
3M中國有限公司 機器人綜合膠粘解決方案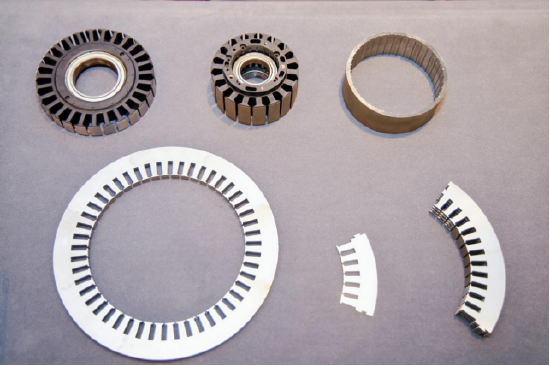
 博邁立鋮投資(中國)有限公司
博邁立鋮投資(中國)有限公司
 青島偉奧通自動化系統有限公司
青島偉奧通自動化系統有限公司 納獅新材料股份有限公司
納獅新材料股份有限公司
 寧波金田銅業(集團)股份有限公司
寧波金田銅業(集團)股份有限公司 科思創(上海)投資有限公司
科思創(上海)投資有限公司 上海盤轂動力科技股份有限公司
上海盤轂動力科技股份有限公司 東莞金坤新材料股份有限公司
東莞金坤新材料股份有限公司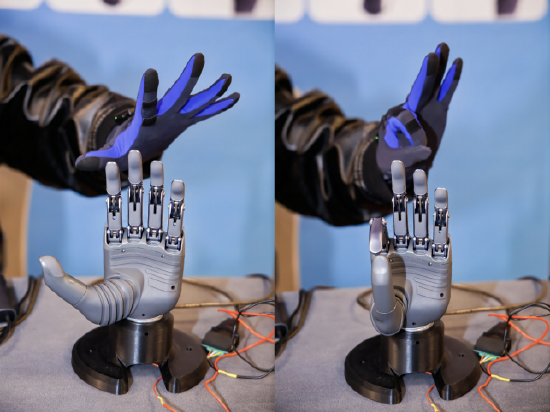 宇疊智能
宇疊智能 矩陣超智
矩陣超智 上海機器人產業技術研究院
上海機器人產業技術研究院 科尋科匯(上海)科技服務有限公司
科尋科匯(上海)科技服務有限公司為期兩天的峯會匯聚了材料、驅動、電機、機器人及人工智能等多個領域的專家與企業代表,從輕量化材料、永磁電機、智能感知到靈巧手技術,多角度展現了人形機器人產業的創新進展與協同潛力。

與會嘉賓普遍認為,未來的人形機器人產業將在高性能磁材、先進電機、柔性傳動、智能感知及材料可持續性等方向持續突破。材料創新與驅動系統優化的融合發展,將進一步推動人形機器人產業的高質量演進。
本次峯會的成功舉辦,為產業鏈上下游搭建了高效溝通與合作的平台,促進了跨領域技術的交流與融合,共同助力人形機器人產業的創新與可持續發展。
新浪聲明:此消息系轉載自新浪合作媒體,新浪網登載此文出於傳遞更多信息之目的,並不意味着讚同其觀點或證實其描述。文章內容僅供參考,不構成投資建議。投資者據此操作,風險自擔。責任編輯:常福強