當特斯拉仍在為靈巧手的工程化與可靠性問題所困,當小鵬汽車公開表示靈巧手因高成本與技術難度短期內難以普及時,整個行業都面臨一個共同難題:為何靈巧手數量衆多,卻依然難以投入實際應用?
許多產品不得不在性能、壽命與成本之間做出艱難取捨:要麼為性能犧牲成本,成為實驗室中的「奢侈品」;要麼為成本妥協性能,淪為「精緻的玩具」。
今天,我們將分享靈巧智能如何打造真正「有用的手」。

一、產業之問:為何靈巧手「遍地開花」,頭部企業仍稱「不實用」?
一些靈巧手品牌宣傳聲勢浩大,甚至號稱佔據全球80%市場份額,但真正的產業用戶為何遲遲不願買單?答案簡單而殘酷:因為它們所宣傳、演示甚至售賣的,往往並非產業真正需要且敢於使用的產品。
以下三個問題,或許是它們不願透露的真相:
1)靈巧手究竟是要替代「人手」,還是「工具」?
靈巧手的目標並非二選一,而是在「替代人手」與「替代工具」之間找到平衡,其終極願景是「替代人手」。
替代「人手」方向追求複製人類手部全部功能,實現在任何人類工作環境中無縫替代,核心設計理念是極致的通用性與擬人化,典型代表為特斯拉Optimus GEN3的22自由度靈巧手。
替代「工具」方向則主張「為何非要是手?解決問題的是一系列專用工具」,其核心是在特定任務中追求高效、可靠與低成本,典型代表為特斯拉Optimus GEN1的6自由度靈巧手。
2)哪些場景真正需要靈巧手?
以汽車製造業為例,衝壓、焊接、噴塗等前序車間自動化率可達90%甚至100%,但總裝車間仍依賴大量人工。這並非技術不足,而是由總裝工序特性、成本效益及人機優勢對比共同決定。
總裝涉及成千上萬零件的組裝,許多步驟需根據實際情況微調、對位、卡扣,遠非簡單的「抓取-放置」,涵蓋非標準化操作、精細操作及綜合感知決策等複雜需求。
類似這樣的場景正是靈巧手的核心應用點——狹窄空間的精細感知與微動操作,需要手、感知與大腦的協同作業。
3)為何靈巧手必須與場景深度結合?
靈巧手的「靈巧」並非固有屬性,而是在特定環境與任務中通過物理交互湧現的能力。脫離具體場景,靈巧手便失去存在的價值與意義。
首先,硬件設計由場景需求驅動。工業裝配可能僅需「三指手」完成抓取、插入等重複任務,而彈鋼琴演奏則需要「五指」協同。
其次,控制算法的有效性高度依賴場景知識。靈巧手控制極為複雜,其智能體現在算法上,而算法的效能完全取決於對場景的理解。未與場景結合的靈巧手僅能執行預設軌跡,無法適應微小變化;而與場景深度結合的靈巧手,通過視覺、力覺、觸覺等傳感器實時獲取信息,調整抓取力、姿態與手勢,實現魯棒且柔順的操作。
最後,學習與訓練數據源於場景。現代靈巧手控制日益依賴機器學習(尤其是強化學習與模仿學習),而模型性能嚴重依賴於訓練數據的質量與廣度。
二、靈巧智能的解決方案:突破「不可能三角」,以操作的「力」為核心,打造「有用的手」
繩驅(腱繩傳動)被公認為實現類人靈巧手的理想路徑,國內靈巧手企業衆多,空心杯電機與腱繩供應鏈成熟,為何繩驅靈巧手廠商不足5家?答案簡單而殘酷:繩驅手的設計難度、量產工藝與可靠性挑戰勸退了大多數玩家。

靈巧智能選擇以機械與控制的複雜性,換取本體結構的輕量化與擬人化,並在此技術路徑上提出以下實踐:
1)硬件靈巧手:以「力」為核心,解決「用手難」問題
靈巧智能繩驅靈巧手產品線涵蓋3款產品,分別面向不同客戶與場景:
通用版五指DexHand021:首款量產繩驅五指靈巧手,面向科研、教育、數據採集、具身智能及生化等行業。通過130套模具實現741個零件的標準化生產,確保產品公差一致性;配備主動散熱系統,支持長時間使用;通過腱繩塗層與繩頭端子設計,解決腱繩蠕變與幹摩擦問題。是目前唯一投入高頻數據採集應用的高自由度繩驅靈巧手。
入門版三指DexHand021S:視觸雙模、雙拇指構型的三指靈巧手,適用於教育、具身智能、工業及農業等場景。無需複雜模型驅動,通過雙拇指構型(彎曲+旋轉)實現約70%人手功能,結合掌心視覺與指尖觸覺,擴展多場景操作任務,為入門用戶提供具身智能最優選。
專業版腕手一體五指DexHand021pro:具備雙繩雙向傳動、全掌感知與端側算力的腕手一體五指靈巧手。通過「外力」觸覺感知與「內力」傳動控制,不僅具備端側抓取規劃的智能化能力,更實現抓取控制的力控能力。
2)高質量數據:以「力」為核心,破解「數據稀疏性」難題
機器人具備三大智能:運動智能、交互智能與操作智能。交互智能核心在於利用大語言模型實現人機情感交互;運動智能核心是「非接觸」,使機器人掌握平衡與協調;而操作智能核心在於「接觸」,不僅關乎手部狀態與被操作物體,更與手-物接觸關係,尤其是「接觸力」信息密切相關。
基於此,靈巧智能開發兩款產品:
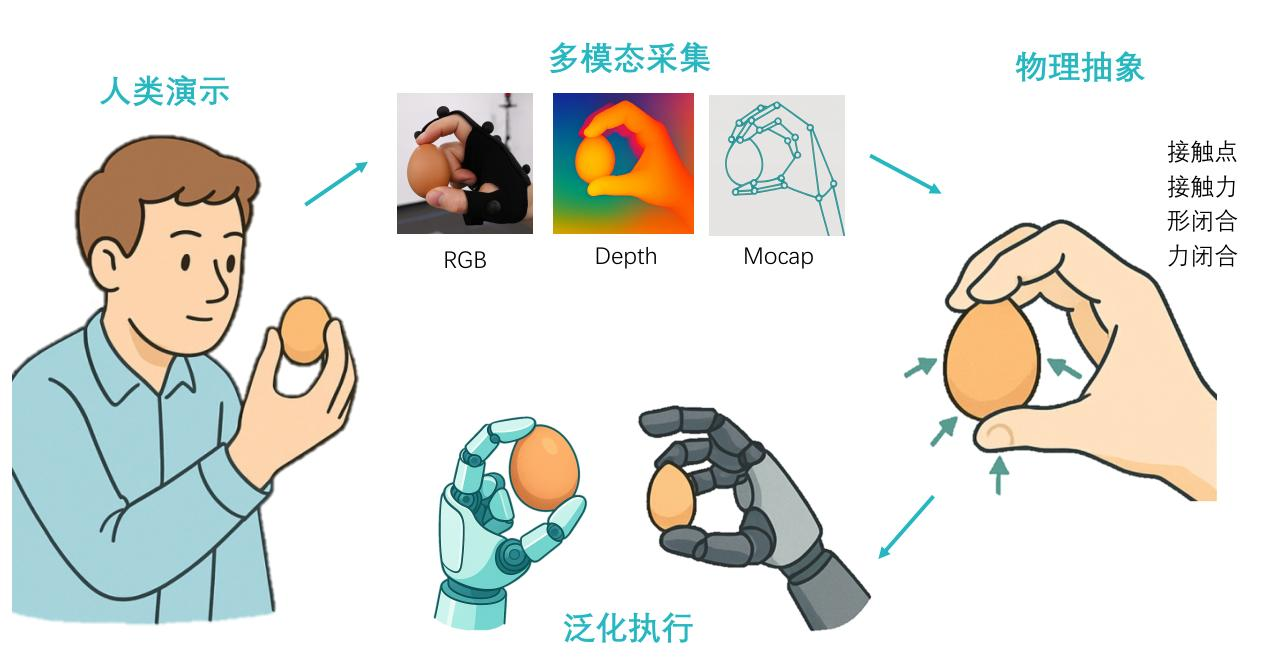
DexCap數據採集外骨骼:通過人類「遙操作」示教機器人,在靈巧手與物體接觸時,結合觸覺傳感器與指尖振動力反饋,實現沉浸式操作與數據採集。
桌面手部動捕與觸覺手套:旨在捕獲人類操作數據,包括主視角操作視頻、上肢(含手指)運動軌跡、被操作物體物理特性及手-物接觸力等多維度信息。今年9月底,靈巧智能重磅開源DexCanvas數據集。
3)操作模型:以小參數量模型,逐步解決「手的操作」難題
手是人類極為精妙的器官,既是感知外界的窗口,也是執行動作與實現交互的關鍵載體。從出生到十歲左右,人類通過持續的手部互動,構建「手—感知—大腦」協調的發育閉環。將此映射至靈巧手發展,可見其運動能力已高度逼近人手,但「腦力」——即認知與決策能力——仍處於類似人類三歲階段,目前僅能實現有限抓握功能。
古人云「隔行如隔山」,又道「紙上得來終覺淺,絕知此事要躬行」,皆揭示「行業操作數據」與「知行合一」的深刻價值。與參數動輒超過300億的大規模視覺語言模型不同,靈巧智能更聚焦於「Action」本身:
一方面,通過多維數據採集與高保真物理仿真增強,構建參數量為30億級的靈巧操作基礎模型;另一方面,與場景需求方深度協同,共建真實環境中的數據採集工廠,在垂直場景中系統獲取操作數據,訓練高度適配的專用操作模型。
靈巧手正站在從「演示可行」到「應用可用」的關鍵十字路口。破解困局之道,並非追求參數上的極致擬人,而在於迴歸「有用」這一本質:通過硬件、數據與模型的深度融合,在真實的產業場景中,將無形的智能轉化為精準可控的「操作力」。道雖遠,篤行可至;事雖巨,堅為必成。我們堅信,當靈巧手能像人手一樣,在紛繁複雜的世界中可靠地完成一個又一個具體任務時,它所觸及的,將不僅是冰冷的機器與零件,更是通用智能機器人與我們共同未來的大門。
關注同花順財經(ths518),獲取更多機會