
每當蘋果在 WWDC 發布新版 iOS,相關熱搜總是會出現類似這樣的話題:究竟哪款老 iPhone 首次被排除在升級名單之外,不幸「掉隊」?
新能源汽車也是如此——引入智能化後,「常用常新」總是廠商會打出的賣點之一。
如今,用戶不只看馬力和續航,更在意智能化更新的可持續性:OTA 的頻率與內容、核心功能的長期可用性(導航/智駕/座艙)、硬件冗餘是否支撐未來升級,以及付費訂閱與保值率的平衡。
換句話說,一台優秀的智能車,不止是當下的配置清單,更是持續進化的能力與承諾。
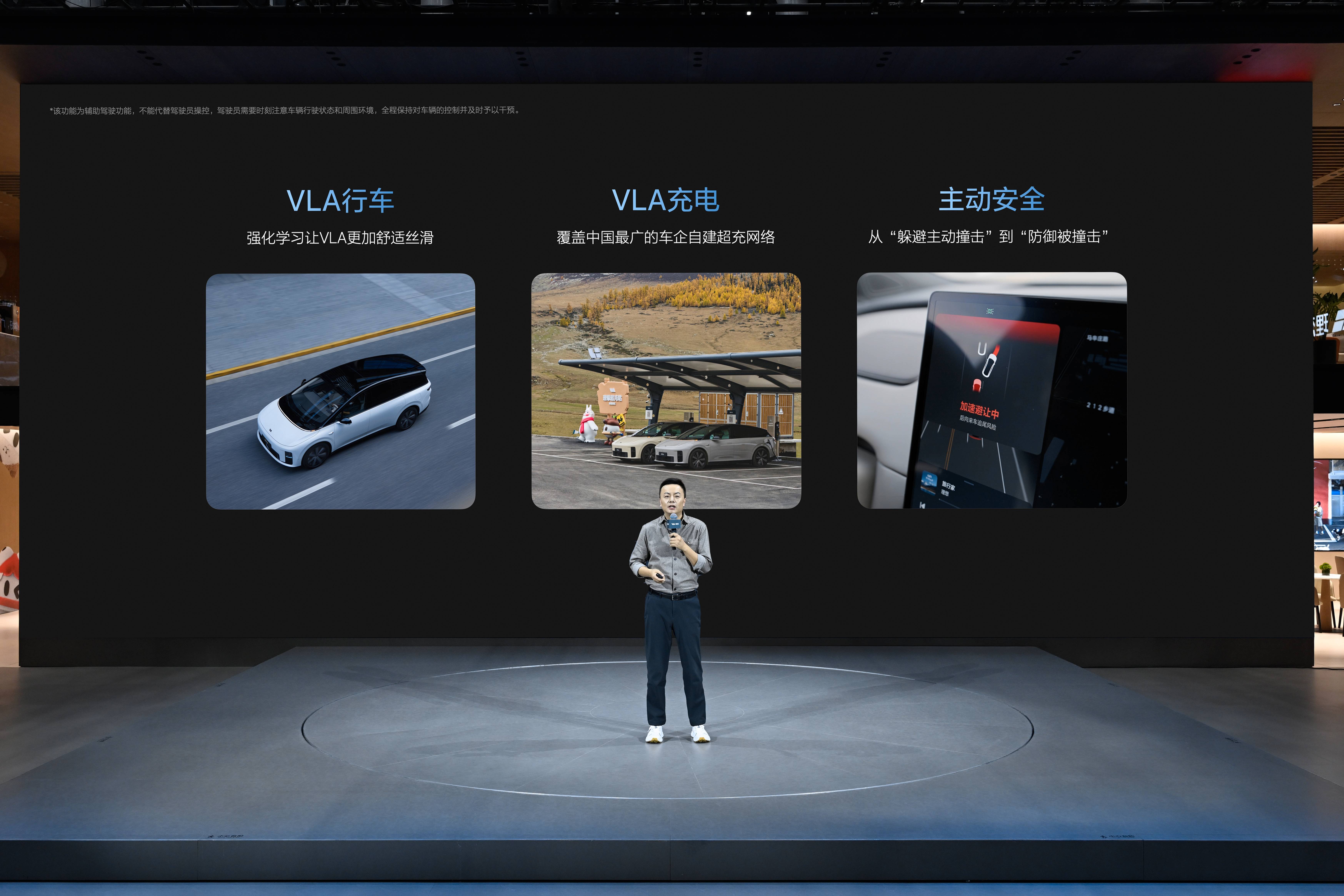

在 2025 年廣州車展上,理想汽車公布了輔助駕駛板塊最新的進展與規劃,帶來了創新的 VLA 充電和防禦性 AES 自動緊急轉向功能,並且計劃向 AD Max 車型全量推送。
我看了看已經陪伴了我 975 天的 2023 款理想 L7 Max,具備 AD Max 的它,仍在更新名單之列。
VLA 充電,打通充電的最後 100 米
基於 9 月份理想為所有 AD Max 車型推送的「VLA司機大模型」,進一步帶來了「VLA 充電」這項全新能力。
從體驗上來說,它看起來也很符合用戶直覺。

行進途中,用戶只要對「理想同學」說出「直接幫我導航到附近的超充站」,系統就會自動搜尋附近的「理想超充站」位置並添加到途徑點。
開啓 NOA 智能領航輔助後,車輛將按照導航自主駛向超充站;臨近站區時,系統會主動推薦空閒充電樁車位,並由 NOA 自動駛入站內並漫遊泊至對應車位,全程幾乎無需手動介入。

目前看起來唯一還需要「手動」操作的,就只有車主下車,手動拔插充電槍這一步驟了。
不過此前理想已經公布了「龍門架」形式的自動充電機器人,單個機器手就能覆蓋站點的多個充電樁位,能自動識別車型充電口與槍頭,實現「人不下車,自動插槍」。

理論上理想可以在現有的這些超充站內,直接進行改造,這也就意味着現在發布會上唯一沒有被點亮的「手動充電」,很可能在後續被打通為「自動充電」。
要實現體驗上的無感且自然,「VLA 充電」這項能力,在技術上也做出了相當多的努力和協同。
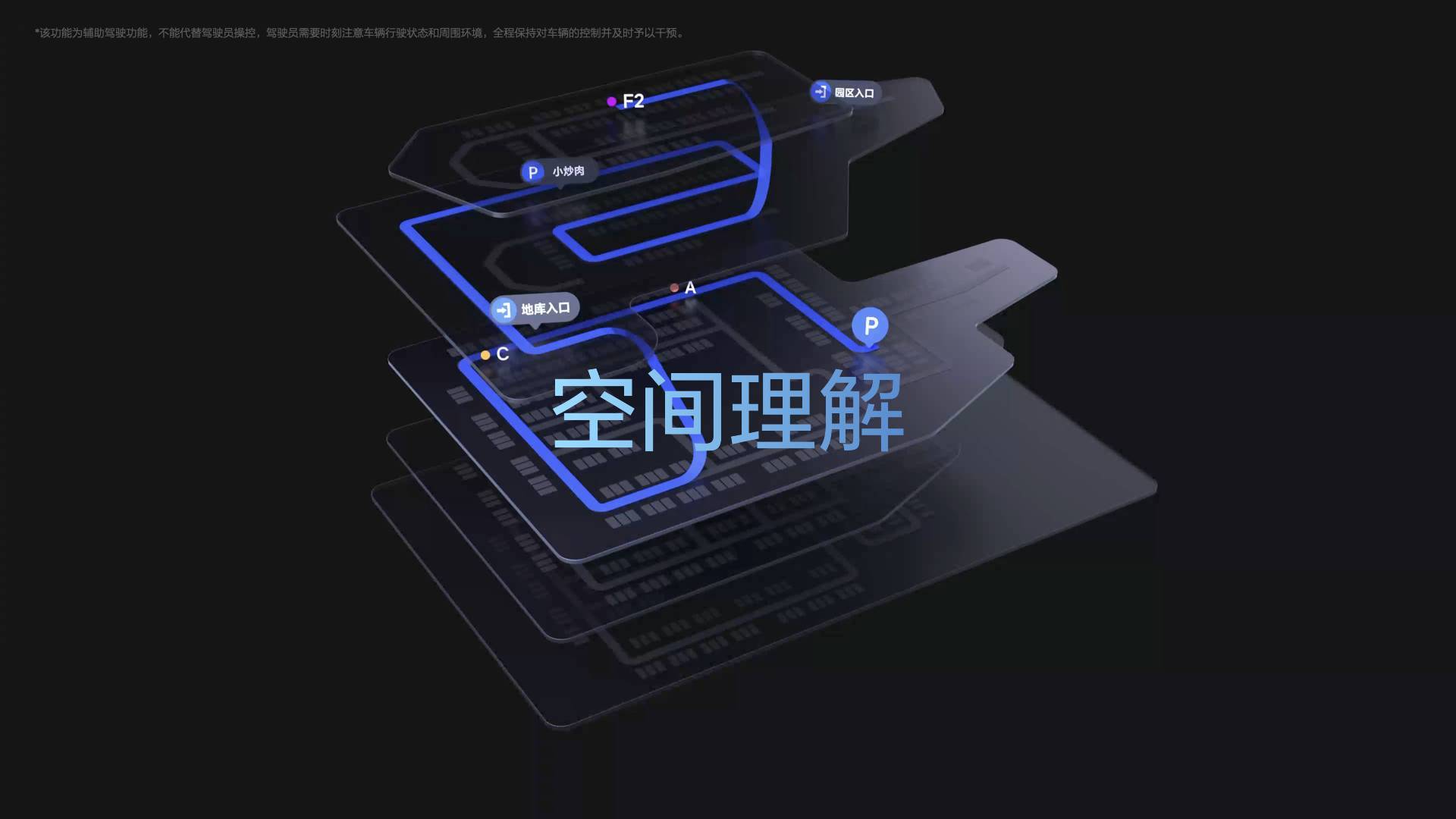
按照理想的介紹,這是 VLA 司機大模型與車終端、超充站、充電樁之間完成端雲協同的顯著成果,在超充站充電這個關鍵的常用場景,驗證了 VLA 具備「理解空間、自動完成任務」的能力。讓 VLA 司機大模型,自主地與超充站實現通訊協同。
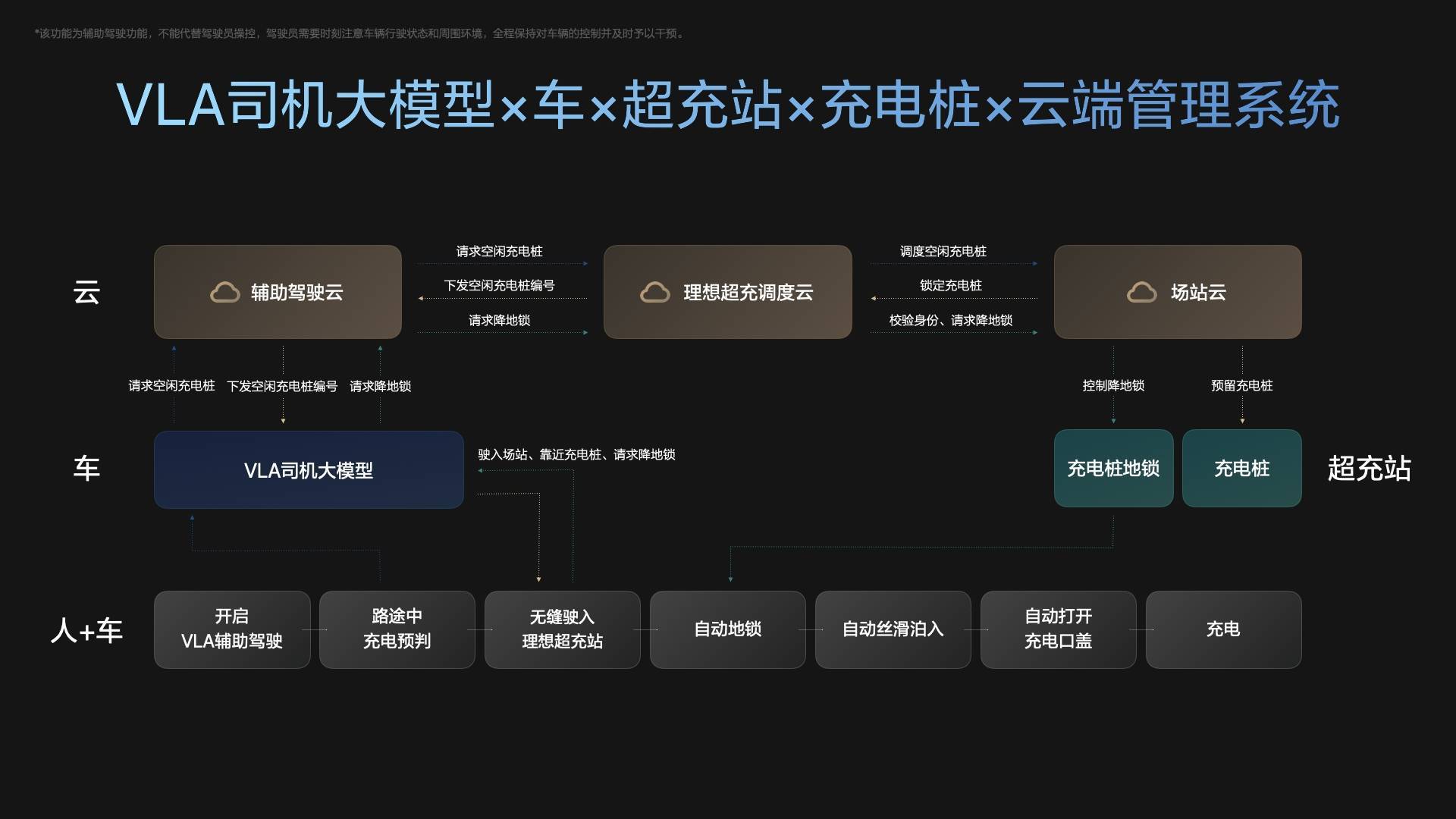
在車端,由 VLA 司機大模型完成空間理解,實現自主駛入場站並泊入充電車位的同時,還會向雲端請求空閒充電樁情況,並協同降下地鎖以便完成自主泊入車位;在雲端,涉及了輔助駕駛雲、理想超充調度雲、場站雲的高效協同,實時下發空閒充電樁信息,並按 VLA 規劃降下地鎖。
車輛充電完成之後,車輛可以自主駛離超充站,並通過免密支付完成充電繳費。

可見,理想的超充站與 AD Max 硬件,是提前預埋的「硬底盤」;VLA 模型,是可以周更精進的「軟引擎」;充電補能,則是用戶高頻且剛性的體驗場景。
VLA 充電正是立足這套軟硬一體的底座,而給出的系統級解法——把「空間理解+行為策略」從道路延伸到自營超充站區,把「找樁充電」升級為「自主充電」。
這本質上是 VLA 路線的厚積薄發:先把基礎設施、傳感器與算力打牢,再用模型把整段體驗打通。
於是,VLA 能力自然而然地,就從「會開」外溢到「會充」,從路網延伸到站內。隨着超充站點覆蓋繼續擴大、VLA 強化學習迭代,以及自動充電等配套落地,補能體驗將持續從可用走向好用,並在實戰中自我進化。
防禦性 AES:自動「躲魚雷」
今年 8 月份發布的 VLA 司機大模型也在不停地迭代,理想宣佈將在下一個版本中,優化 NOA 領航輔助駕駛在行車中的結合複雜場景。
面對相鄰的紅綠燈,VLA 會更加精準地完成識別;面對極窄路段的會車場景,也會向右借極窄空間繞行。在面對施工路段、臨時改道的場景,VLA 也能像真實司機一樣從容應對。

與此同時,無論城市通勤還是高速巡航,VLA 在軌跡平滑與制動/轉向的柔和度上都在持續進化,行車更穩更舒適,行為操作也更加類人。
當然,理想汽車的輔助駕駛不僅在行車、泊車等場景持續進化,也在主動安全上不斷拓展能力邊界、抬升上限。

此前在理想 i8 發布會上,理想防禦性 AES 就已經覆蓋了三大場景,包括式截停、慢車加塞、惡意別車等高風險場景,車輛可以主動地識別此類風險並自主地完成相應的主動防禦避讓策略。


現在,理想還新增了兩個防禦性 AES 能力,在後車逼近或存在二次碰撞風險時,車輛自主就能聯動「加速+轉向」策略,通過「前向加速」或「安全變道」主動規避後方「魚雷」,避免被追尾的碰撞風險。
至此,理想的防禦性 AES 可以有效避免來自車輛前方、後方、側前、側後的碰撞風險,升級至全方位的保護能力。
按照規劃,理想將在後續的 OTA 中,把防禦性 AES 能力推送給所有 AD Max 車型。
理想 VLA:六維體驗的長期主義
自年初提出 VLA 大模型之後,理想在取得進展的同時,也在面臨着外部質疑,有同行認為它「取巧走不遠」,也有業內專家認為「難以落地」。
面對這些質疑,理想汽車自動駕駛研發高級副總裁郎鹹朋在接受媒體採訪時回應:
他們反對 VLA,恰恰說明 VLA 是正確的。

▲理想汽車自動駕駛研發高級副總裁 郎鹹朋
在理想汽車看來,上一代技術能力的上限,是下一代技術能力的起點。這也是理想從「端到端+VLM」切換到「VLA 司機大模型」的原因。
VLA 的主張不是「更像人開車」的表演,而是用多模態大模型 + 強化學習,把「看懂場景—做出決策—用數據閉環持續變好」的鏈路真正跑通,這與曾經由「端到端 + 數據閉環」來替代「規則拼裝」的技術演進,是一脈相承的。
從技術角度看,VLA 讓輔助駕駛從「猴子時期」邁進了「人類時期」,擁有了「能思考、能溝通、能記憶、能自我提升」的能力。

較早之前,理想 VLA 司機大模型就定下過六維指標:「選對路、速度對、舒適度、安心感、可溝通、高效率」。
從「自主會開」到「自主會充」,從道路到站區,從能剎住到會躲開,VLA 持續讓「智駕」的價值從單點功能推到整段體驗。
全新的 VLA 充電能力,讓「補能」這個常用場景首次實現了「理解空間、自動完成任務」的空間理解,也驗證了理想堅持 VLA 路線的正確性——可遷移、可學習、可持續進化,這正是理想汽車日益堅實的護城河之一。
同時,最新的「防禦性 AES 」首次將 AES 功能擴展到「正前/正後/側前/側後」的全域風險規避。
就目前而言,VLA 還未曾到達「技術能力上限」的位置,仍然在不斷地迭代進化,它仍然有着很多需要去落地的探索點,這也就說明 VLA 接下來還會有更多的能力,可以被更新釋放。

基業長青的公司往往特別看重厚積薄發與長期複利,所以真正的護城河從來都不在 PPT 的算法名詞當中,而是在每一公里的穩定行駛、每一次自主進站的充電補能、每一次被避免的事故當中。
理想 VLA 的長期價值,正在這些可被持續驗證的細節中不斷放大。