炒股就看金麒麟分析師研報,權威,專業,及時,全面,助您挖掘潛力主題機會!
文|新浪財經上海站 陳秀穎
 (圖:T9-W防爆輪式機器人在鋼鐵廠高爐風口平台巡檢)
(圖:T9-W防爆輪式機器人在鋼鐵廠高爐風口平台巡檢)十年前,中國的移動式特種機器人還只是化工廠、煉化基地裏的一小撮「試驗品」,常常被夾在管廊、罐區、高壓電網之間小心翼翼地試用。
如今,天創機器人把一台台防爆人形機器人開進了這些場景裏,從移動特種巡檢機器人,到具身智能、防爆人形機器人,天創花了將近十年時間。這些機器人在化工廠、電力站、煤礦、鍋爐房裏巡檢、看錶計、聽異響,常常出現在最危險、最不適合人類久留的地方。
真正讓劉爽下定決心「轉身」的,是兩件事:AI大模型帶來的推理和交互能力躍遷,以及馬斯克把Optimus推到台前之後,全行業對人形機器人產業可能性的重新想象。
在他眼裏,2015年之前是傳統工業機器人的一代;2015–2023年,是「協作、服務、搬運和巡檢」四大品類構成的第二代;而2023年之後,行業共識開始收斂到兩個詞:具身智能和人形/類人形。
天創機器人對於時代的回答,則是在一個高度危險、對可靠性近乎偏執的場景裏,做出一台能真正「幹活」的防爆人形機器人——而不是先去卷價格、卷量產。
許多新興機器人公司的故事起於展台、起於孖展、起於Demo,那麼天創機器人的故事起於——一個化工廠的夜班、一個煤礦井下的風道、一個70℃的油氣裝置間、一個必須讓機器人代替人的危險任務。
這是天創機器人與整個行業之間最獨特、最根深蒂固的差異。以機器智慧,入無人之境。這是這家公司最本質的價值觀。
直到具身智能這個詞出現,直到人形機器人被推上春晚舞台、被特斯拉和馬斯克反覆舉起,行業開始重新打量這些曾經只被稱作特種機器人的傢伙。
在這次與新浪財經的對話裏,他試圖把這場從特種機器人到具身智能的戰略轉向講清楚:
為什麼他們堅持從工業場景出發,而不是跟着消費級熱點做雙足人形?
為什麼在全行業談量產、降本的時候,他要反覆給同行潑冷水?
以及,在這條被反覆拿來類比新能源車的賽道上,他怎麼看中國和世界的長期博弈。

兩次拐點:從GPT到Optimus,具身智能被按下開始鍵
新浪財經:你們做移動式特種機器人已經十幾年了,從什麼契機開始覺得,具身智能和人形機器人,可能是下一輪機器人革命的大機會?
劉爽:如果把這一波做機器人的企業拉成一條時間線,你會發現,大家真正集體意識到具身智能這件事,大概有兩個同步的拐點。第一個拐點,是掐着GPT出來的那一刻。ChatGPT把大家對AI的認知,直接從‘做分類、做識別’跳到了‘能推理、能對話、能決策’。對我們這些一直做機器人控制的人來說,這件事的震撼在於——連接主義這套東西,終於有了一個可以和實體世界結合的抓手。
以前我們講機器人更多是控制論、自動化、結構可靠性,都是比較硬的東西。GPT出來之後,大家第一次真正相信:AI的交互能力、推理能力、決策能力可以大幅提升,天然有機會和現有機器人結合。
第二個拐點,則和馬斯克搞的Optimus密切相關。馬斯克在這個時代的角色,有點像科技教主。他歷史上想幹的大事,基本都幹成了——電動車、火箭、可回收、星鏈,現在輪到人形機器人。他在這件事情上的戰略堅定性和激進程度,讓整個行業不得不重新評估:人形機器人不是科幻,而是一個產業級的可能性。這兩個拐點疊在一起,才真正把具身智能、人形機器人變成行業共識。
三代中國機器人公司:從場景出發,到‘人形+具身智能’共識
新浪財經:你提到這一代做機器人的人,在不同階段有不同理解。你會怎麼分這幾代中國機器人企業?
劉爽:我個人的劃分,是三代。第一代,是2015年之前,以傳統工業機器人為主。這撥企業裏已經有很多上市公司,比如做伺服、做控制、做六軸機器人的。第二代,大概是2015年到2023年前後,主要是這些品類:
l 協作機器人(輕量化的7軸機械臂那一類)
l 服務類機器人(傳菜、迎賓、酒店送外賣)
l 搬運機器人(AGV、AMR)
l 巡檢機器人(特種巡檢、安防巡檢)
這一代的特點,是強場景導向:我從需求側出發,找到一個具體場景,然後提供成本和效率最優解的機器人解決方案。大家並不是按具身智能、人形這些概念去定義自己,而是按照垂直場景去分工。第三代,也就是現在這一波,基本上是以通用人形機器人本體+具身大腦這兩個邏輯作為目標的。
2023年之後,行業共識開始向這兩個關鍵詞收攏。一方面是大模型帶來的認知變化,另一方面是Optimus這種標誌性事件把人形拉到了一個新的敘事高度。
新浪財經:所以你會認為,這個行業一直在做,只不過每一次高潮,往往都得等一個‘全球性的事件’來重新點燃?
劉爽:是的。你可以理解為,一直有人在默默幹活,但是真正能把敘事推到台前的,一定是那種改變所有人預期的節點。GPT和Optimus就是這樣的節點。
 (圖:T7-E輪式機器人在冶金廠巡檢)
(圖:T7-E輪式機器人在冶金廠巡檢)天創機器人的起點:從特種巡檢,到防爆人形機器人天魁一號
新浪財經:在這波浪潮裏,天創機器人的真正入局點是什麼?有沒有哪個時間點,你會認為是一個標誌性事件?
劉爽:我們自己真正深入介入具身和人形這兩個方向,是在2025年1月——那時候,我們正式發布了全球首款防爆人形機器人——天魁一號。
這個產品有兩個含義:
1. 對外:它代表天創正式在人形機器人這個邏輯上入局;
2. 對內:它標誌着,我們在具身智能上的技術路線,從特種巡檢+小模型升級到人形+大模型,從只看不動手的巡檢機器人到即可看也要乾的巡檢、操作一體機器人進化。
其實在這之前,具身智能這件事對我們來說並不是突然出現。
我們做巡檢機器人起家,場景都在工業一線。像化工廠、油氣、電力、煤化工,這些地方的機器人,對於現場感知+決策的要求,比很多服務機器人要早得多、也高得多。我們在AI應用上的起步,其實比許多餐飲、酒店機器人更早。只是早期更多是基於小模型在做——做缺陷判斷、做模式識別,幫助機器人理解設備狀態。
天魁一號,是我們在這個認知基礎上做出的一個形態上的決定:如果你要在工業領域代表行業,做一款滿足真實用戶需求的人形機器人,它應該長什麼樣?
為什麼我們不搶着做雙足:工業世界裏,腳不是剛需,手纔是本質
新浪財經:你們在外形上一直堅持做輪式/履帶式,而不是雙足,這在這一波人形熱裏算是一個比較逆潮流的決定。這裏面有什麼核心判斷?
劉爽:足式行走,有它的邏輯,也有實際意義。但如果你冷靜地把工業場景攤開來看,會發現幾個事實:
1. 工業現場的可達性問題,用輪式、履帶式、軌道式這幾種基礎行走結構,已經可以覆蓋絕大部分需求;
2. 用戶真正關心的,不是它怎麼走,而是末端能做什麼——能不能擰閥門、拉閘、搬重物、操作設備;
3. 工業場景對機器人有幾個很強的約束:
高防護:防塵、防水、防爆,耐腐蝕;
高負載:擰閥門、搬重物需要很大的力矩;
上半身作業能力遠比下半身行走更關鍵。
在這樣的前提下,足就不再是剛需,反而是一個會顯著增加複雜度和風險的選項。
我們後來給自己下的判斷是:在工業現場決定機器人產業成長性的,一定是上半身的可塑性能力,而不是行走。
行走是一個幾何問題,是一個相對可控的工程問題;真正難的是讓一個機器人在上半身完成多樣的、有力的、安全的操作——拉、擰、搬、抓、推、插拔……你會看到,現在行業裏做輪式底盤支撐人形上半身的方案越來越多,海外也是這樣。我們某種意義上只是把這個判斷提得更早一點。
行業裏的噪音:人人都在談量產,但需求側還沒真正出現
新浪財經:現在行業內對人形機器人的期待很高。你也說過,想給行業‘潑潑冷水’。你覺得當下最大的噪音是什麼?
劉爽:我個人最想潑的那盆冷水就是——大家太早在拼命喊量產了。
量產的邏輯,應該來自於需求側。但我們現在看到的是什麼?是機器人廠家自己在講:我一年能做多少台、我的產線產能多大。我們沒有在需求側看到真正規模化的應用。
就拿大家最看好的汽車主機廠來說。如果你實地去工廠參觀,會發現:人形機器人基本不在主生產線上,而是被安排在一條試驗線上做實驗。原因很簡單:汽車生產線的節奏和效率非常高,人形機器人現在的作業效率,會拖慢整體產線產出。所以在我看來,現在這種激進談降本、激進談量產的討論,是有點喧賓奪主的。
我們更應該做的是:在更多可能的場景裏,不計成本地先跑通幾個真正能閉環的商業化應用;等這些場景跑順了,再回頭做降本、做複製、做橫向擴展;而不是一開始就只拿着錘子到處找釘子。
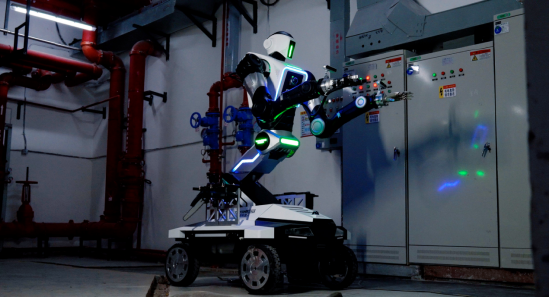 (圖:天魁1號人形防爆機器人在配電房巡檢作業)
(圖:天魁1號人形防爆機器人在配電房巡檢作業)真機vs仿真:工業場景裏的world model,沒那麼容易畫出來
新浪財經:你們做的是工業場景,又強調具身智能,這種場景下的數據和大模型怎麼結合?還以真機+仿真那套二分法去看嗎?
劉爽:今天這個行業從數據來源角度,大致有兩個學派:仿真派、真機派。真機派的問題大家都知道:場景複雜、成本高。民用場景還好,你要訓練一個端茶倒水的機器人,搭一個小房子就夠了。但工業場景完全不是這樣——鍋爐、壓力容器、電機、風機、長距離管廊、立體管線……這些東西的幾何形態、物理特性太複雜了。你要在仿真環境裏畫對這些東西都很難,更別說疊加聲、光、熱、力這些一維物理量。這會直接導致一個問題:你用仿真生成的數據,在真實工業場景下的可用性非常有限。
所以在工業領域,我們更傾向於:把機器人投到一個相對真實的仿真環境裏;或者乾脆直接上現場,一邊幹活、一邊積累數據——我們叫幹中學、學中幹。
但工業又對可靠性、安全性有很高要求,所以我們必須結合遙操作技術來做:在遙操作的過程中,一邊讓機器人立刻可作業,一邊把這一切當成數據採集和素材積累過程。這其實就是從SD到自動駕駛的那套邏輯在工業機器人上的翻版:目前是遙操作+自主的階段,而不是直接跳到全自主。
大腦的戰爭:world model+大語言模型+強化學習,多技術混合分層架構
新浪財經:現在很多玩家在外形、運控上競爭得很兇,但你反覆在講大腦。你覺得接下來幾年,機器人的大腦競速會發生什麼?
劉爽:做本體、做運控,有它非常明確的商業邏輯。像某些本體公司,把外形+小腦做到極致,然後和下游有一定開發能力的科研院所、企業合作,去補大腦,這條路徑是說得通的。但如果你問我:在未來3~5年裏,如果具身智能要真正跑出一些能力拐點,它會發生在哪裏?我會毫不猶豫地說,在大腦。
這個大腦不是一個單一模型,而是一個混合架構:world model幫助機器人理解物理世界,做場景分割,為疊加更多物理狀態量(力、溫度、摩擦)打基礎;大語言模型(或者說任務模型)負責任務分解、流程規劃,把複雜任務切片成一段段可執行的動作鏈;末端執行,則更多依賴強化學習出來的動作專家庫,保證動作執行的精度和安全性。
你不能指望一個純粹的VLM或者純語言模型,既能理解世界,又能把末端執行做到微米級的精度。機床加工可以做到微米級,是控制論的強項,而不是大模型天生擅長的領域。所以我們天創機器人在實際落地時,用的是一個多技術融合的方案:用world model做前置感知和物理世界理解;用語言模型做任務級的推理和拆解;用強化學習動作庫,保障每一個動作片段的執行質量。
這也是為什麼我一直說:如果你只是面對無人駕駛這種單任務系統,可能單一技術範式還能撐一下;但一旦到了具身智能機器人,這種多任務、複雜系統就不可能只靠一種技術。
中國的優勢與短板:除了基礎模型,硬件鏈上我們是全面領先
新浪財經:如果把鏈條拆開,從整機到執行器、傳感器、模型、供應鏈,你覺得中國在哪些環節已經具備全球級優勢?
劉爽:如果我們把顆粒度切到模組及以上這個層面——在整機、核心零部件、傳感器、執行器這些環節上,我會判斷:我們在產業鏈上的整體能力,是全面超越的。國外在大部分硬件模塊上,已經沒有太多可以碾壓我們的地方了。當然,大腦模型、基礎模型能力上,我們和國外還存在差距。我們也看到,國內很多從清北、交大、浙大出來的科學家,在這一塊持續發力、做長期研究,這條路不會短。但如果你拉長時間軸,把這件事當成類似電動車、光伏的產業過程來看,你就會得到一個比較確定性的結論:當具身智能機器人真正找到某個可大規模複製的、天花板足夠高的應用場景時,從科研產品變成製造業產品的那一刻,這個主場一定是在中國。
新能源車也是類似邏輯——特斯拉領跑十年二十年,但從某個節點開始,中國車企在規模和供應鏈上接過了接力棒。
天魁一號:全球首款防爆人形機器人背後的場景反推
新浪財經:回到天魁一號,它被稱為全球首款防爆人形機器人。你們當時是怎麼反推出這個需求的?
劉爽:這個產品本質上是場景倒逼形態。我們做了很多年工業巡檢運維機器人,跑過大量危化場景、電力場景、煤礦場景。我們很清楚,在這些場景中,工人要具備什麼樣的能力和資格,才能合法上崗——比如防爆等級要求、作業高度、負載能力、操作動作類型。
於是我們給自己出了一個題:如果在中國要做一台真正能幫工人幹活的人形機器人,在化工、電力、煤礦這種高危場景裏,它應該長什麼樣?幾個關鍵約束就出來了:
防爆能力:必須滿足防爆標準,能進危險區域;
重負載能力:雙臂負載加起來要能達到幾十公斤級別,才能擰大閥門、搬重物;
身高和體態:既要適應工業現場設備的高度,又要兼顧穩定性和可達性。
天魁一號的身形、重量、防爆等級、負載能力,其實都是從這些具體場景和工人的日常工作中倒推出來的。
另外一塊,是我們過去在硬件結構化設計上的積累。我們從做特種巡檢開始,就在防護、防爆結構設計上做了大量工程化工作——所以後來很多做無人駕駛、做工業設備的企業,會來找我們幫他們設計防爆結構。最近還有一個新任務,是幫一家做無人配送的企業設計防爆電池pack。這些能力加在一起,才讓我們做出全球第一個防爆人形機器人。
 (圖:T9-W防爆輪式機器人在化工廠甲醇車間自主智能巡檢)
(圖:T9-W防爆輪式機器人在化工廠甲醇車間自主智能巡檢)電池與熱管理:防爆不是套個鐵殼子那麼簡單
新浪財經:防爆對機器人的密封材質要求本來就很高,再疊加頻繁操作,你們在電池冷卻、散熱上做了哪些改進?
劉爽:防爆這件事,說簡單也簡單——你只要把東西做得足夠笨重、殼子足夠厚,用個很重的鐵皮把所有東西包住,理論上就能防爆。但對機器人來說,這是不可接受的。我們需要的是輕量化+高防爆等級並存。在電池上,我們現在做的是隔爆,而不是本安防爆。這與鋰電池的天然特性有關。
具體工程上,我們做了幾件事:
1. 低溫場景:用鈉離子電池,解決低溫段性能、冷啓動問題;在電池倉裏做預加熱機制,貼片式加熱條,實現主動熱管理。
2. 高溫場景:做主動散熱裝置;研究電池微液冷系統,保證在高溫工況下的匹配。比如中東有項目要求適應70℃環境,如果不做主動熱管理,只靠被動散熱是撐不住的。
3. 結構級防爆:通過局部強化、結構加強、變密度加工工藝等手段,在儘量不增加重量的情況下,滿足隔爆標準;目前我們坦誠說,只做到T4級,還沒有到T6級,這也是未來要攻的關。所以防爆不是簡單加厚一個殼,而是一整套系統工程,要在能量密度、熱管理、防爆結構、重量之間找到平衡點。
成本、付費與玩具人形:真正的短板,不在成本,而在可作業能力
新浪財經:天魁一號這種產品成本很高,聽起來距離大規模應用很遠。對你們來說,最大的阻力是什麼?是成本,還是客戶認知?
劉爽:今天最大的阻力,本質上還是技術——機器人可作業能力。我們的下游客戶大量是央企和國企,他們客觀來說付費能力並不弱:在一些前瞻性場景,他們願意拿科研經費、立項預算,來先試先行。真正的關鍵問題是:你能不能在這個場景跑得通?能不能做到真正可作業,而不是只會走個過場?
我一直在跟同行講一個觀點:成本不會成為中國具身智能機器人產業的bug。我們的工業能力足夠強,把一個1000塊錢的總成做成幾十塊錢,這不是難事。關鍵在規模,在量。你去看光伏、電池這些行業,十年把成本打到原來的1/10,是通過產業化的規模實現的。我相信機器人賽道大概率也會複製類似的曲線。所以今天這麼早就把成本當成競爭邏輯,是邏輯不通的。
更有趣的是用戶認知——很多用戶對機器人的認知,其實是超預期的,我們反而要管控他們的預期。今年上半年,人形機器人火得一塌糊塗,各種唱歌跳舞的視頻刷屏之後,很多業主以為:機器人馬上就可以進家庭,陪你聊天、幹家務;馬上就可以大規模進工業現場,穩定爬樓、開門、按按鈕。但當他們真的把機器人請進現場,就會發現現實差距非常大:連穩定爬樓梯這件事情,要做到通過率超過50%,對現階段的雙足人形機器人來說都不是一件容易的事。
所以我經常說:如果機器人真的能幫你幹家務,10萬、20萬都會有人買;如果只是一個玩具,你賣到1000塊錢,很多人都覺得貴。
人才與產學研:想不踏空,就得提前十步去高校看方向
新浪財經:你多次提到基礎研究的重要性,現在天創在招人時會更看重哪類人才?
劉爽:我們現在招人有個挺有意思的現象——非常願意招數學、統計學、應用數學出身的同學,特別是做數據統計、建模的。原因很簡單:2013~2015年之前那一波機器人公司,做的是工程化問題——把成熟的底層技術摘下來,做應用層創新和場景方案;2023年之後這一波,做具身智能的公司,更多是在看基礎學科的研究能力,和底層技術的研發能力。
現在我們看一個新成立的具身智能機器人公司,會看三點:
1. 有沒有首席科學家?他是什麼教育背景、科研高度?
2. 團隊過去發了哪些論文、做過哪些project?
3. 產業定位是什麼,是做大腦,還是做本體,還是做關鍵零部件?
對於我們這些已經走到工程化批量應用階段的企業來說,如果不想在具身智能階段踏空,就必須回頭去做一些基礎理論研究和產學研結合。
我自己去年也回清華讀了自動化系的博士。今年11月清華成立具身智能與機器人研究院,我的導師是這個研究院的副院長,學院依託自動化系建設,整合了計算機、機械、電子幾個專業。我覺得這是一個很強的信號:在做產業應用、做工程創新的同時,我們必須同步跟蹤基礎理論,在基礎研究上找到自己可以單點突破的抓手,構成企業長期的核心競爭力。你剛纔提到產學研融合,確實,高校教授往往不懂商業,企業又不一定能深入基礎科研,中間有一道鴻溝。
大家其實有共識:能發高水平論文的成果,10年內通常不會大規模產業化。所以企業真正要做的是——提前半步。問題在於,要提前半步,你就得提前十步去高校看方向。在一個技術範式尚未收斂的時代,這件事非常難,但又非常必要。
遙操作只是過渡,危險作業是終極目標
新浪財經:你多次提到遙操作+自主是現在的技術狀態,你覺得遙操作會不會成為一種長期形態?
劉爽:我看得比較清楚:遙操作一定是一個過渡形態。它的價值有兩點:
1. 支撐當下機器人立刻可作業,讓機器人今天就能幹點活;
2. 在遙操作的過程中,為未來全自主階段,積累數據和作業經驗。
你可以把它理解為自動駕駛裏的輔助駕駛。今天我們叫它遙操作,某種程度上,它就是具身機器人時代的L2/L2+。
新浪財經:如果用一句話來概括,你最希望機器人替人類完成的事情是什麼?
劉爽:只要是存在人傷風險的作業,都不應該再由人去做,都應該交給機器人。這是我們做天創、做天魁一號這類產品最原始的動力。
 (圖:天創機器人具身智能體驗中心)
(圖:天創機器人具身智能體驗中心)三年戰略:圍繞工業智能運維,把可作業這件事閉環
新浪財經:如果用三個詞去概括天創未來三年的戰略,你會怎麼說?
劉爽:我們內部其實挺清晰的,一直都不是簡單地講人形機器人,而是講可作業機器人。從2017年我們給公司的定位就是:工業智能運維的全球領軍企業。
工業智能運維這件事,我們把它拆成了這幾個階段:
1. 可達:先把機器人送到現場;
2. 可感:把數據採回來,做分析、做故障診斷、做輔助決策;
3. 可作業:既能看,也能動手;
4. 後面還有更高階段,是全自主、全閉環的智能運維。
天創未來三年的戰略很簡單:在工業智能運維領域,依託人形機器人等技術,把可作業這件事真正閉環。
新浪財經:如果你要說天創機器人的護城河,是產業技術,還是場景覆蓋?
劉爽:我們現在是兩條腿走路:一條是產品研發的先發優勢;一條是在產業應用生態上的打造。人形機器人這件事情,一定要靠生態才能成長。從這個角度看,我非常認可一些類似公司的生態價值——它們早期最牛的地方,不只是品牌或者創始人的光環,而是軟硬一體化做得足夠早,並且在科研場景裏形成了生態:大量高校、科研機構的人才,是用它們的硬件和軟件做應用開發長大的;這些人走上工作崗位之後,有慣性,會繼續基於這套生態往下做。
這就像當年自動化行業裏的PLC:你在學校學的是三菱,畢業後十年可能都習慣用三菱。這種路徑依賴極強。我今天看人形機器人企業,也會用類似邏輯去看:誰有能力在研發端和應用端,同時形成一個穩定的生態網絡,誰就更有長期的確定性。
結語:這是一個又寬又長的賽道,我們還在前半程
最後一個問題,我問劉爽:有沒有哪個關鍵瞬間,讓你確信具身智能機器人一定會改變社會?
他的回答沒有給出一個具體時刻,而是對這幾年信息爆炸速度的一種感受:已經不是某一個瞬間了,而是持續處在一種興奮狀態。每年都有五六個事件,讓你看到機器人能力在往前走。從春晚舞台上拋手絹的人形,到工業現場裏擰閥門的天魁一號;從科研實驗室裏精巧的靈巧手,到礦區、化工廠的巡檢機器人;從大模型驅動的世界模型,到強化學習出來的動作庫……這條從特種機器人到具身智能的路,還遠沒有走完。
在劉爽看來,這只是一個又寬又長賽道的前半程。
他沒有急着給出一個具體的時間表,而是反覆強調一句話:先別急着談量產和成本,先把機器人在真實場景裏的可作業能力,一點一點做紮實。
 (圖:劉爽在生產工廠指導工作)
(圖:劉爽在生產工廠指導工作)責任編輯:公司觀察