你知道,在蔚来现有用户中,智能泊车辅助功能的使用率达到了多少吗?
答案是60%。
没错,随着今年3月蔚来推送“随心停”功能,加上此前的各类车位泊入、离车泊入、全向遥控泊出、直线召唤等功能,蔚来实现了行业功能矩阵最完善、场景覆盖最全的智能泊车辅助。此后的一个月里,有60%的蔚来用户在使用智能泊车辅助,平均每秒就有超过2名蔚来用户“优雅泊入”。
这意味着,智能泊车已经成为了蔚来整个智能驾驶辅助体系中,用户最高频使用的功能。

既然用户已经这么爱用,那接下来蔚来的智能泊车还有什么进步的空间呢?
当然有。一方面,我们要持续提升泊车的体验,在覆盖场景和泊入效率上继续增强;另一方面,智能泊车最终的目的不是把车停到车位,而是为了更便捷地下车,进入到下一场景中。

因此,在“蔚来世界模型 NWM”的首个版本中,我们用行业首个全模型化的智能泊车辅助,把泊车的上限再次提升。
那么,全模型化的智能泊车辅助,究竟提升了什么?我们不妨先来看一个短片。
“NWM智能泊车”
解决了什么痛点?
如果你回想一下自己使用智能泊车辅助的过程,大概会有这么几个步骤:第一步人看到空车位,第二步手动把车开到空车位前,第三步在中控屏上选择要泊入的车位,第四步等待车辆泊入。
那么,这里其实就有几个亟待优化的痛点。
首先,能识别的车位范围很窄。
大多数智能泊车都是依靠4颗环视摄像头来识别车位,可以识别的范围通常也就是周边两三个车位。所以,找寻车位必须要靠人眼,找到后也必须要把车开到空车位的前方停正,才能启动智能泊车。
其次,发起智能泊车的位置很受限。
比如,当车辆已经处在车位里时,大多数智能泊车是无法启动的。这时如果需要腾挪车位,就必须要手动将车开出,把车开到目标车位前,才能进行智能泊车。
然后,泊入过程非常机械化。
依赖规则的智能泊车辅助,在泊车轨迹的计算上也会比较教条。比如侧方位的泊车,即便目标车位前后没有车,也一定要完整地复现一遍科目二的标准动作;比如原有泊车轨迹上如果突然多出了障碍物,大概也就会卡死在原地。
而这些痛点,蔚来通过行业首个全模型化的智能泊车辅助功能,可以一一解决。

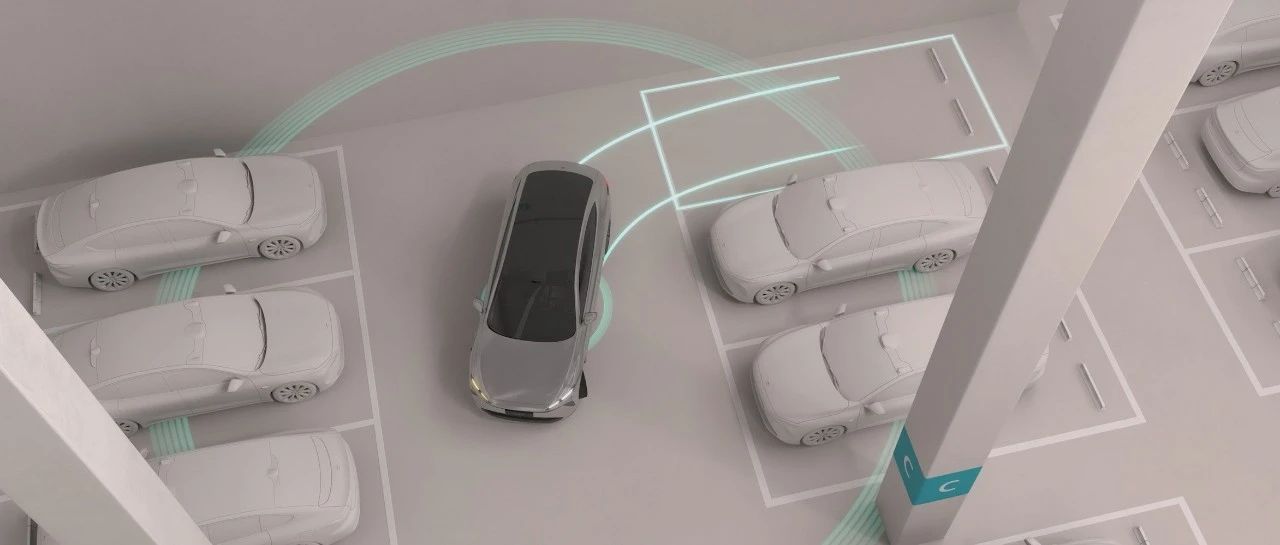
在“蔚来世界模型 NWM”中,泊车不再只调用4个环视摄像头,而是将负责行车的7个800万像素摄像头加入进来。这不仅大幅拓展了车位识别的范围,而且在模型能力的支持下,还可以像鸟瞰一样,俯视观察和理解停车场的车位与空间结构信息。
正如大家在视频中所看到,NWM智能泊车可以实现360°全向车位识别,不管是侧边的、对面的、背后的、隔着立柱的、跨通道的车位,NWM智能泊车都可以识别,显示范围相比传统的智能泊车提升了4倍。而且因为蔚来独有的瞭望塔式传感器布局,可以在复杂的场景里越过遮挡,看到人眼所看不到的,做到“超视距”的车位识别。

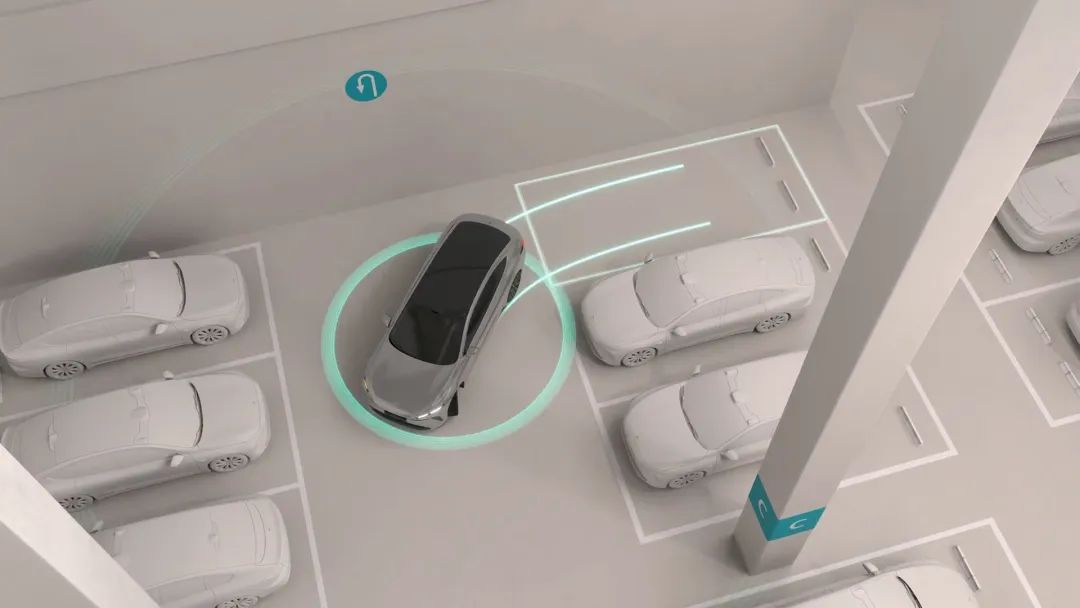
而且,NWM智能泊车不仅“可见即可选”,还能做到“可选即可泊”。不需要特定的起点,只要发现了目标车位,那么在任意位置都能发起泊车指令。即便是跨通道的车位,NWM智能泊车也能借用通道进行长距离的漫游泊车,或者在车位中腾挪自动换车位。
最后,NWM智能泊车基于大量优秀司机数据的模型训练,不仅泊车轨迹的规划更拟人,而且轨迹可以做到实时规划。借用空车位空间提升整体泊车效率,对于NWM智能泊车自然不在话下,哪怕是泊车过程中,有人突然往后面放了个桩桶,NWM智能泊车也能即时计算,立刻规划出一条全新的路线,比泊车高手还高手。

所以,我们可以用三点总结一下全模型化的NWM智能泊车:360°超视距车位识别指哪打哪、轨迹实时规划更拟人、能借用通道长距离漫游泊车。
行业最好用智能泊车
如何再升级?
在NWM智能泊车到来之前,蔚来用户的智能泊车使用率之所以能达到60%,功能场景覆盖全面当然是很重要的一点。
车位的识别上,蔚来智能泊车对水平、垂直、斜列、弧度、低矮坡度等多种类型车位均能响应。遥控泊车的形式上,蔚来智能泊车既能直线召唤,也能全向遥控泊出,配合NIO Phone还能实现下车无需任何操作的超感泊车。操作的方式上,蔚来智能泊车既能车机屏幕操作、NOMI语音唤醒操作,还支持行业内唯一的物理按键一键泊车。

但更让蔚来用户爱用智能泊车的,还远不只是覆盖场景丰富,更有优秀的体验。蔚来智能泊车的平均泊车入位时间仅为35秒,近40%的车位可以实现一把入位、无需腾挪。而且,蔚来智能泊车在速度3km/h下都可以激活,不需要把车刹停,泊入过程中还可以自动偏向非主驾侧,不需要任何操作就可以为主驾位留出更多的下车空间。
总结下来,蔚来智能泊车在此前已经给用户提供了足够的可用性、成功率与安心感,从而获得了用户的高频使用。

但是,这些都还算是智能泊车的“下限”。而NWM智能泊车的目的,就是在守住基础体验下限的同时,做好突出能力提升的上限场景,不仅让智能泊车的拟人化媲美老司机,同时为将来更先进的智能泊车形态,进行能力的准备。比如大家看到NWM智能泊车现在可以跨通道漫游、跨车位腾挪,而这在将来就是远程遥控或者召唤的基础,也是为用户提供安心、自由的下车体验的重要能力储备。
在“蔚来世界模型 NWM”首个版本推送后,我们希望能有更多的用户朋友们使用蔚来的智能泊车。或许在下次统计数据时,泊车能力“下降”的蔚来用户,可能就不只有60%了。

“蔚来世界模型 NWM”首个版本,将于5月底全量推送“Banyan 榕”车型,将于6月底全量推送“Cedar 雪松”车型,敬请期待。





文章原文
