炒股就看金麒麟分析师研报,权威,专业,及时,全面,助您挖掘潜力主题机会!
文|新浪财经上海站 陈秀颖
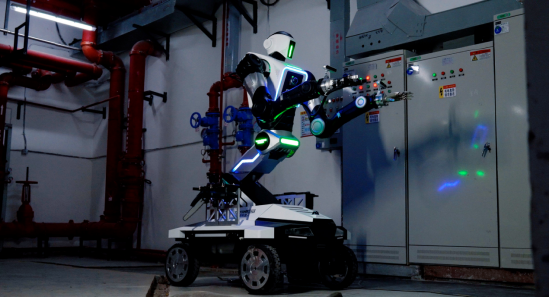
 (图:T9-W防爆轮式机器人在钢铁厂高炉风口平台巡检)
(图:T9-W防爆轮式机器人在钢铁厂高炉风口平台巡检)十年前,中国的移动式特种机器人还只是化工厂、炼化基地里的一小撮“试验品”,常常被夹在管廊、罐区、高压电网之间小心翼翼地试用。
如今,天创机器人把一台台防爆人形机器人开进了这些场景里,从移动特种巡检机器人,到具身智能、防爆人形机器人,天创花了将近十年时间。这些机器人在化工厂、电力站、煤矿、锅炉房里巡检、看表计、听异响,常常出现在最危险、最不适合人类久留的地方。
真正让刘爽下定决心“转身”的,是两件事:AI大模型带来的推理和交互能力跃迁,以及马斯克把Optimus推到台前之后,全行业对人形机器人产业可能性的重新想象。
在他眼里,2015年之前是传统工业机器人的一代;2015–2023年,是“协作、服务、搬运和巡检”四大品类构成的第二代;而2023年之后,行业共识开始收敛到两个词:具身智能和人形/类人形。
天创机器人对于时代的回答,则是在一个高度危险、对可靠性近乎偏执的场景里,做出一台能真正“干活”的防爆人形机器人——而不是先去卷价格、卷量产。
许多新兴机器人公司的故事起于展台、起于融资、起于Demo,那么天创机器人的故事起于——一个化工厂的夜班、一个煤矿井下的风道、一个70℃的油气装置间、一个必须让机器人代替人的危险任务。
这是天创机器人与整个行业之间最独特、最根深蒂固的差异。以机器智慧,入无人之境。这是这家公司最本质的价值观。
直到具身智能这个词出现,直到人形机器人被推上春晚舞台、被特斯拉和马斯克反复举起,行业开始重新打量这些曾经只被称作特种机器人的家伙。
在这次与新浪财经的对话里,他试图把这场从特种机器人到具身智能的战略转向讲清楚:
为什么他们坚持从工业场景出发,而不是跟着消费级热点做双足人形?
为什么在全行业谈量产、降本的时候,他要反复给同行泼冷水?
以及,在这条被反复拿来类比新能源车的赛道上,他怎么看中国和世界的长期博弈。

两次拐点:从GPT到Optimus,具身智能被按下开始键
新浪财经:你们做移动式特种机器人已经十几年了,从什么契机开始觉得,具身智能和人形机器人,可能是下一轮机器人革命的大机会?
刘爽:如果把这一波做机器人的企业拉成一条时间线,你会发现,大家真正集体意识到具身智能这件事,大概有两个同步的拐点。第一个拐点,是掐着GPT出来的那一刻。ChatGPT把大家对AI的认知,直接从‘做分类、做识别’跳到了‘能推理、能对话、能决策’。对我们这些一直做机器人控制的人来说,这件事的震撼在于——连接主义这套东西,终于有了一个可以和实体世界结合的抓手。
以前我们讲机器人更多是控制论、自动化、结构可靠性,都是比较硬的东西。GPT出来之后,大家第一次真正相信:AI的交互能力、推理能力、决策能力可以大幅提升,天然有机会和现有机器人结合。
第二个拐点,则和马斯克搞的Optimus密切相关。马斯克在这个时代的角色,有点像科技教主。他历史上想干的大事,基本都干成了——电动车、火箭、可回收、星链,现在轮到人形机器人。他在这件事情上的战略坚定性和激进程度,让整个行业不得不重新评估:人形机器人不是科幻,而是一个产业级的可能性。这两个拐点叠在一起,才真正把具身智能、人形机器人变成行业共识。
三代中国机器人公司:从场景出发,到‘人形+具身智能’共识
新浪财经:你提到这一代做机器人的人,在不同阶段有不同理解。你会怎么分这几代中国机器人企业?
刘爽:我个人的划分,是三代。第一代,是2015年之前,以传统工业机器人为主。这拨企业里已经有很多上市公司,比如做伺服、做控制、做六轴机器人的。第二代,大概是2015年到2023年前后,主要是这些品类:
l 协作机器人(轻量化的7轴机械臂那一类)
l 服务类机器人(传菜、迎宾、酒店送外卖)
l 搬运机器人(AGV、AMR)
l 巡检机器人(特种巡检、安防巡检)
这一代的特点,是强场景导向:我从需求侧出发,找到一个具体场景,然后提供成本和效率最优解的机器人解决方案。大家并不是按具身智能、人形这些概念去定义自己,而是按照垂直场景去分工。第三代,也就是现在这一波,基本上是以通用人形机器人本体+具身大脑这两个逻辑作为目标的。
2023年之后,行业共识开始向这两个关键词收拢。一方面是大模型带来的认知变化,另一方面是Optimus这种标志性事件把人形拉到了一个新的叙事高度。
新浪财经:所以你会认为,这个行业一直在做,只不过每一次高潮,往往都得等一个‘全球性的事件’来重新点燃?
刘爽:是的。你可以理解为,一直有人在默默干活,但是真正能把叙事推到台前的,一定是那种改变所有人预期的节点。GPT和Optimus就是这样的节点。
 (图:T7-E轮式机器人在冶金厂巡检)
(图:T7-E轮式机器人在冶金厂巡检)天创机器人的起点:从特种巡检,到防爆人形机器人天魁一号
新浪财经:在这波浪潮里,天创机器人的真正入局点是什么?有没有哪个时间点,你会认为是一个标志性事件?
刘爽:我们自己真正深入介入具身和人形这两个方向,是在2025年1月——那时候,我们正式发布了全球首款防爆人形机器人——天魁一号。
这个产品有两个含义:
1. 对外:它代表天创正式在人形机器人这个逻辑上入局;
2. 对内:它标志着,我们在具身智能上的技术路线,从特种巡检+小模型升级到人形+大模型,从只看不动手的巡检机器人到即可看也要干的巡检、操作一体机器人进化。
其实在这之前,具身智能这件事对我们来说并不是突然出现。
我们做巡检机器人起家,场景都在工业一线。像化工厂、油气、电力、煤化工,这些地方的机器人,对于现场感知+决策的要求,比很多服务机器人要早得多、也高得多。我们在AI应用上的起步,其实比许多餐饮、酒店机器人更早。只是早期更多是基于小模型在做——做缺陷判断、做模式识别,帮助机器人理解设备状态。
天魁一号,是我们在这个认知基础上做出的一个形态上的决定:如果你要在工业领域代表行业,做一款满足真实用户需求的人形机器人,它应该长什么样?
为什么我们不抢着做双足:工业世界里,脚不是刚需,手才是本质
新浪财经:你们在外形上一直坚持做轮式/履带式,而不是双足,这在这一波人形热里算是一个比较逆潮流的决定。这里面有什么核心判断?
刘爽:足式行走,有它的逻辑,也有实际意义。但如果你冷静地把工业场景摊开来看,会发现几个事实:
1. 工业现场的可达性问题,用轮式、履带式、轨道式这几种基础行走结构,已经可以覆盖绝大部分需求;
2. 用户真正关心的,不是它怎么走,而是末端能做什么——能不能拧阀门、拉闸、搬重物、操作设备;
3. 工业场景对机器人有几个很强的约束:
高防护:防尘、防水、防爆,耐腐蚀;
高负载:拧阀门、搬重物需要很大的力矩;
上半身作业能力远比下半身行走更关键。
在这样的前提下,足就不再是刚需,反而是一个会显著增加复杂度和风险的选项。
我们后来给自己下的判断是:在工业现场决定机器人产业成长性的,一定是上半身的可塑性能力,而不是行走。
行走是一个几何问题,是一个相对可控的工程问题;真正难的是让一个机器人在上半身完成多样的、有力的、安全的操作——拉、拧、搬、抓、推、插拔……你会看到,现在行业里做轮式底盘支撑人形上半身的方案越来越多,海外也是这样。我们某种意义上只是把这个判断提得更早一点。
行业里的噪音:人人都在谈量产,但需求侧还没真正出现
新浪财经:现在行业内对人形机器人的期待很高。你也说过,想给行业‘泼泼冷水’。你觉得当下最大的噪音是什么?
刘爽:我个人最想泼的那盆冷水就是——大家太早在拼命喊量产了。
量产的逻辑,应该来自于需求侧。但我们现在看到的是什么?是机器人厂家自己在讲:我一年能做多少台、我的产线产能多大。我们没有在需求侧看到真正规模化的应用。
就拿大家最看好的汽车主机厂来说。如果你实地去工厂参观,会发现:人形机器人基本不在主生产线上,而是被安排在一条试验线上做实验。原因很简单:汽车生产线的节奏和效率非常高,人形机器人现在的作业效率,会拖慢整体产线产出。所以在我看来,现在这种激进谈降本、激进谈量产的讨论,是有点喧宾夺主的。
我们更应该做的是:在更多可能的场景里,不计成本地先跑通几个真正能闭环的商业化应用;等这些场景跑顺了,再回头做降本、做复制、做横向扩展;而不是一开始就只拿着锤子到处找钉子。
 (图:天魁1号人形防爆机器人在配电房巡检作业)
(图:天魁1号人形防爆机器人在配电房巡检作业)真机vs仿真:工业场景里的world model,没那么容易画出来
新浪财经:你们做的是工业场景,又强调具身智能,这种场景下的数据和大模型怎么结合?还以真机+仿真那套二分法去看吗?
刘爽:今天这个行业从数据来源角度,大致有两个学派:仿真派、真机派。真机派的问题大家都知道:场景复杂、成本高。民用场景还好,你要训练一个端茶倒水的机器人,搭一个小房子就够了。但工业场景完全不是这样——锅炉、压力容器、电机、风机、长距离管廊、立体管线……这些东西的几何形态、物理特性太复杂了。你要在仿真环境里画对这些东西都很难,更别说叠加声、光、热、力这些一维物理量。这会直接导致一个问题:你用仿真生成的数据,在真实工业场景下的可用性非常有限。
所以在工业领域,我们更倾向于:把机器人投到一个相对真实的仿真环境里;或者干脆直接上现场,一边干活、一边积累数据——我们叫干中学、学中干。
但工业又对可靠性、安全性有很高要求,所以我们必须结合遥操作技术来做:在遥操作的过程中,一边让机器人立刻可作业,一边把这一切当成数据采集和素材积累过程。这其实就是从SD到自动驾驶的那套逻辑在工业机器人上的翻版:目前是遥操作+自主的阶段,而不是直接跳到全自主。
大脑的战争:world model+大语言模型+强化学习,多技术混合分层架构
新浪财经:现在很多玩家在外形、运控上竞争得很凶,但你反复在讲大脑。你觉得接下来几年,机器人的大脑竞速会发生什么?
刘爽:做本体、做运控,有它非常明确的商业逻辑。像某些本体公司,把外形+小脑做到极致,然后和下游有一定开发能力的科研院所、企业合作,去补大脑,这条路径是说得通的。但如果你问我:在未来3~5年里,如果具身智能要真正跑出一些能力拐点,它会发生在哪里?我会毫不犹豫地说,在大脑。
这个大脑不是一个单一模型,而是一个混合架构:world model帮助机器人理解物理世界,做场景分割,为叠加更多物理状态量(力、温度、摩擦)打基础;大语言模型(或者说任务模型)负责任务分解、流程规划,把复杂任务切片成一段段可执行的动作链;末端执行,则更多依赖强化学习出来的动作专家库,保证动作执行的精度和安全性。
你不能指望一个纯粹的VLM或者纯语言模型,既能理解世界,又能把末端执行做到微米级的精度。机床加工可以做到微米级,是控制论的强项,而不是大模型天生擅长的领域。所以我们天创机器人在实际落地时,用的是一个多技术融合的方案:用world model做前置感知和物理世界理解;用语言模型做任务级的推理和拆解;用强化学习动作库,保障每一个动作片段的执行质量。
这也是为什么我一直说:如果你只是面对无人驾驶这种单任务系统,可能单一技术范式还能撑一下;但一旦到了具身智能机器人,这种多任务、复杂系统就不可能只靠一种技术。
中国的优势与短板:除了基础模型,硬件链上我们是全面领先
新浪财经:如果把链条拆开,从整机到执行器、传感器、模型、供应链,你觉得中国在哪些环节已经具备全球级优势?
刘爽:如果我们把颗粒度切到模组及以上这个层面——在整机、核心零部件、传感器、执行器这些环节上,我会判断:我们在产业链上的整体能力,是全面超越的。国外在大部分硬件模块上,已经没有太多可以碾压我们的地方了。当然,大脑模型、基础模型能力上,我们和国外还存在差距。我们也看到,国内很多从清北、交大、浙大出来的科学家,在这一块持续发力、做长期研究,这条路不会短。但如果你拉长时间轴,把这件事当成类似电动车、光伏的产业过程来看,你就会得到一个比较确定性的结论:当具身智能机器人真正找到某个可大规模复制的、天花板足够高的应用场景时,从科研产品变成制造业产品的那一刻,这个主场一定是在中国。
新能源车也是类似逻辑——特斯拉领跑十年二十年,但从某个节点开始,中国车企在规模和供应链上接过了接力棒。
天魁一号:全球首款防爆人形机器人背后的场景反推
新浪财经:回到天魁一号,它被称为全球首款防爆人形机器人。你们当时是怎么反推出这个需求的?
刘爽:这个产品本质上是场景倒逼形态。我们做了很多年工业巡检运维机器人,跑过大量危化场景、电力场景、煤矿场景。我们很清楚,在这些场景中,工人要具备什么样的能力和资质,才能合法上岗——比如防爆等级要求、作业高度、负载能力、操作动作类型。
于是我们给自己出了一个题:如果在中国要做一台真正能帮工人干活的人形机器人,在化工、电力、煤矿这种高危场景里,它应该长什么样?几个关键约束就出来了:
防爆能力:必须满足防爆标准,能进危险区域;
重负载能力:双臂负载加起来要能达到几十公斤级别,才能拧大阀门、搬重物;
身高和体态:既要适应工业现场设备的高度,又要兼顾稳定性和可达性。
天魁一号的身形、重量、防爆等级、负载能力,其实都是从这些具体场景和工人的日常工作中倒推出来的。
另外一块,是我们过去在硬件结构化设计上的积累。我们从做特种巡检开始,就在防护、防爆结构设计上做了大量工程化工作——所以后来很多做无人驾驶、做工业设备的企业,会来找我们帮他们设计防爆结构。最近还有一个新任务,是帮一家做无人配送的企业设计防爆电池pack。这些能力加在一起,才让我们做出全球第一个防爆人形机器人。
 (图:T9-W防爆轮式机器人在化工厂甲醇车间自主智能巡检)
(图:T9-W防爆轮式机器人在化工厂甲醇车间自主智能巡检)电池与热管理:防爆不是套个铁壳子那么简单
新浪财经:防爆对机器人的密封材质要求本来就很高,再叠加频繁操作,你们在电池冷却、散热上做了哪些改进?
刘爽:防爆这件事,说简单也简单——你只要把东西做得足够笨重、壳子足够厚,用个很重的铁皮把所有东西包住,理论上就能防爆。但对机器人来说,这是不可接受的。我们需要的是轻量化+高防爆等级并存。在电池上,我们现在做的是隔爆,而不是本安防爆。这与锂电池的天然特性有关。
具体工程上,我们做了几件事:
1. 低温场景:用钠离子电池,解决低温段性能、冷启动问题;在电池仓里做预加热机制,贴片式加热条,实现主动热管理。
2. 高温场景:做主动散热装置;研究电池微液冷系统,保证在高温工况下的匹配。比如中东有项目要求适应70℃环境,如果不做主动热管理,只靠被动散热是撑不住的。
3. 结构级防爆:通过局部强化、结构加强、变密度加工工艺等手段,在尽量不增加重量的情况下,满足隔爆标准;目前我们坦诚说,只做到T4级,还没有到T6级,这也是未来要攻的关。所以防爆不是简单加厚一个壳,而是一整套系统工程,要在能量密度、热管理、防爆结构、重量之间找到平衡点。
成本、付费与玩具人形:真正的短板,不在成本,而在可作业能力
新浪财经:天魁一号这种产品成本很高,听起来距离大规模应用很远。对你们来说,最大的阻力是什么?是成本,还是客户认知?
刘爽:今天最大的阻力,本质上还是技术——机器人可作业能力。我们的下游客户大量是央企和国企,他们客观来说付费能力并不弱:在一些前瞻性场景,他们愿意拿科研经费、立项预算,来先试先行。真正的关键问题是:你能不能在这个场景跑得通?能不能做到真正可作业,而不是只会走个过场?
我一直在跟同行讲一个观点:成本不会成为中国具身智能机器人产业的bug。我们的工业能力足够强,把一个1000块钱的总成做成几十块钱,这不是难事。关键在规模,在量。你去看光伏、电池这些行业,十年把成本打到原来的1/10,是通过产业化的规模实现的。我相信机器人赛道大概率也会复制类似的曲线。所以今天这么早就把成本当成竞争逻辑,是逻辑不通的。
更有趣的是用户认知——很多用户对机器人的认知,其实是超预期的,我们反而要管控他们的预期。今年上半年,人形机器人火得一塌糊涂,各种唱歌跳舞的视频刷屏之后,很多业主以为:机器人马上就可以进家庭,陪你聊天、干家务;马上就可以大规模进工业现场,稳定爬楼、开门、按按钮。但当他们真的把机器人请进现场,就会发现现实差距非常大:连稳定爬楼梯这件事情,要做到通过率超过50%,对现阶段的双足人形机器人来说都不是一件容易的事。
所以我经常说:如果机器人真的能帮你干家务,10万、20万都会有人买;如果只是一个玩具,你卖到1000块钱,很多人都觉得贵。
人才与产学研:想不踏空,就得提前十步去高校看方向
新浪财经:你多次提到基础研究的重要性,现在天创在招人时会更看重哪类人才?
刘爽:我们现在招人有个挺有意思的现象——非常愿意招数学、统计学、应用数学出身的同学,特别是做数据统计、建模的。原因很简单:2013~2015年之前那一波机器人公司,做的是工程化问题——把成熟的底层技术摘下来,做应用层创新和场景方案;2023年之后这一波,做具身智能的公司,更多是在看基础学科的研究能力,和底层技术的研发能力。
现在我们看一个新成立的具身智能机器人公司,会看三点:
1. 有没有首席科学家?他是什么教育背景、科研高度?
2. 团队过去发了哪些论文、做过哪些project?
3. 产业定位是什么,是做大脑,还是做本体,还是做关键零部件?
对于我们这些已经走到工程化批量应用阶段的企业来说,如果不想在具身智能阶段踏空,就必须回头去做一些基础理论研究和产学研结合。
我自己去年也回清华读了自动化系的博士。今年11月清华成立具身智能与机器人研究院,我的导师是这个研究院的副院长,学院依托自动化系建设,整合了计算机、机械、电子几个专业。我觉得这是一个很强的信号:在做产业应用、做工程创新的同时,我们必须同步跟踪基础理论,在基础研究上找到自己可以单点突破的抓手,构成企业长期的核心竞争力。你刚才提到产学研融合,确实,高校教授往往不懂商业,企业又不一定能深入基础科研,中间有一道鸿沟。
大家其实有共识:能发高水平论文的成果,10年内通常不会大规模产业化。所以企业真正要做的是——提前半步。问题在于,要提前半步,你就得提前十步去高校看方向。在一个技术范式尚未收敛的时代,这件事非常难,但又非常必要。
遥操作只是过渡,危险作业是终极目标
新浪财经:你多次提到遥操作+自主是现在的技术状态,你觉得遥操作会不会成为一种长期形态?
刘爽:我看得比较清楚:遥操作一定是一个过渡形态。它的价值有两点:
1. 支撑当下机器人立刻可作业,让机器人今天就能干点活;
2. 在遥操作的过程中,为未来全自主阶段,积累数据和作业经验。
你可以把它理解为自动驾驶里的辅助驾驶。今天我们叫它遥操作,某种程度上,它就是具身机器人时代的L2/L2+。
新浪财经:如果用一句话来概括,你最希望机器人替人类完成的事情是什么?
刘爽:只要是存在人伤风险的作业,都不应该再由人去做,都应该交给机器人。这是我们做天创、做天魁一号这类产品最原始的动力。
 (图:天创机器人具身智能体验中心)
(图:天创机器人具身智能体验中心)三年战略:围绕工业智能运维,把可作业这件事闭环
新浪财经:如果用三个词去概括天创未来三年的战略,你会怎么说?
刘爽:我们内部其实挺清晰的,一直都不是简单地讲人形机器人,而是讲可作业机器人。从2017年我们给公司的定位就是:工业智能运维的全球领军企业。
工业智能运维这件事,我们把它拆成了这几个阶段:
1. 可达:先把机器人送到现场;
2. 可感:把数据采回来,做分析、做故障诊断、做辅助决策;
3. 可作业:既能看,也能动手;
4. 后面还有更高阶段,是全自主、全闭环的智能运维。
天创未来三年的战略很简单:在工业智能运维领域,依托人形机器人等技术,把可作业这件事真正闭环。
新浪财经:如果你要说天创机器人的护城河,是产业技术,还是场景覆盖?
刘爽:我们现在是两条腿走路:一条是产品研发的先发优势;一条是在产业应用生态上的打造。人形机器人这件事情,一定要靠生态才能成长。从这个角度看,我非常认可一些类似公司的生态价值——它们早期最牛的地方,不只是品牌或者创始人的光环,而是软硬一体化做得足够早,并且在科研场景里形成了生态:大量高校、科研机构的人才,是用它们的硬件和软件做应用开发长大的;这些人走上工作岗位之后,有惯性,会继续基于这套生态往下做。
这就像当年自动化行业里的PLC:你在学校学的是三菱,毕业后十年可能都习惯用三菱。这种路径依赖极强。我今天看人形机器人企业,也会用类似逻辑去看:谁有能力在研发端和应用端,同时形成一个稳定的生态网络,谁就更有长期的确定性。
结语:这是一个又宽又长的赛道,我们还在前半程
最后一个问题,我问刘爽:有没有哪个关键瞬间,让你确信具身智能机器人一定会改变社会?
他的回答没有给出一个具体时刻,而是对这几年信息爆炸速度的一种感受:已经不是某一个瞬间了,而是持续处在一种兴奋状态。每年都有五六个事件,让你看到机器人能力在往前走。从春晚舞台上抛手绢的人形,到工业现场里拧阀门的天魁一号;从科研实验室里精巧的灵巧手,到矿区、化工厂的巡检机器人;从大模型驱动的世界模型,到强化学习出来的动作库……这条从特种机器人到具身智能的路,还远没有走完。
在刘爽看来,这只是一个又宽又长赛道的前半程。
他没有急着给出一个具体的时间表,而是反复强调一句话:先别急着谈量产和成本,先把机器人在真实场景里的可作业能力,一点一点做扎实。
 (图:刘爽在生产工厂指导工作)
(图:刘爽在生产工厂指导工作)责任编辑:公司观察