IT之家 3 月 2 日消息,成都人形机器人创新中心自主研发的全球首个全尺寸重载双轮足机器人开源平台于今日(3 月 2 日)正式发布。
本次发布的开源平台,包含了从整机设计、核心控制系统到关键算法的全套技术资料。
即日起,全球所有开发者、高校实验室或科创团队,都可以通过成都人形机器人创新中心官方渠道,免费获取这款 RW-02OP 双轮足机器人的全部核心技术资产。这是一套从图纸到算法的完整开发套装:
本体全开源:公开包含整机三维结构模型、硬件系统框图、详细物料清单(BOM)及硬件功能教程在内的全套设计资料。开发者可基于此,深入理解平台架构,进行定制化修改以及二次开发。
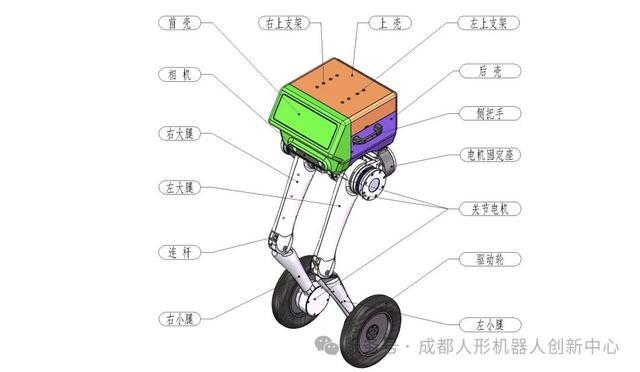
结构总装图
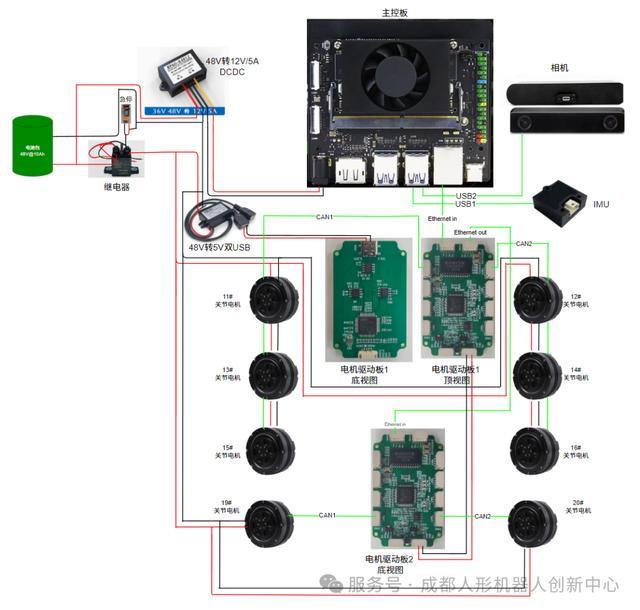
实物接线图
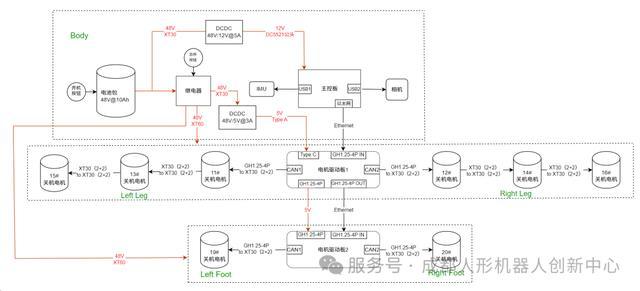
硬件方案框图
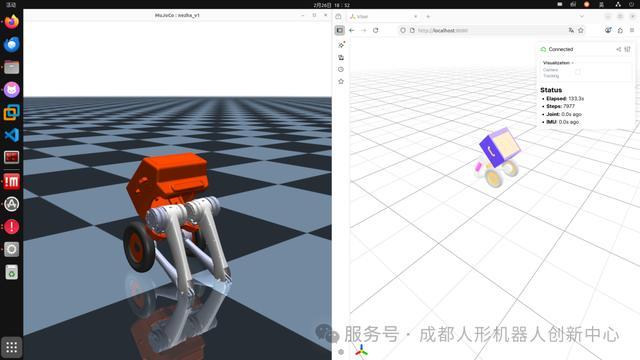
软件全开源:开放本机开发的底层源代码,全部组件通过 ROS 包形式提供,包括机器人 MJCF 模型文件、仿真以及 sim2sim 框架代码、基于 LQR 的控制器代码、控制器参数自动生成代码以及相关的调试工具(数据采集与分析代码、在线状态查看、遥控)等,简化开发流程。

代码界面

仿真界面
训练界面
仿真视频 1:站立、上坡与下台阶
仿真视频 2:单边与斜坡
仿真视频 3:水平快速运动
此次开源的双轮足机器人平台,专为复杂环境下的重载移动与灵活作业设计,机器人本体身高 1.1m,整机重量 21kg。
设计负载能力远超同类轮式机器人,可在负重下稳定运行,负载能力 10kg,近 0.5 负重比。
轮足复合设计,兼具轮式高速与足式越障能力,可应对台阶、坡道、松软地面、碎石等地形。
硬件与算法针对多场景鲁棒性(robustness,系统在面临着内部结构或外部环境的改变时也能够维持其功能稳定运行的能力)进行强化。
